
Tao Liu, Hao Li, Tao He, Cunzheng Fan, Zhijun Yan, Deming Liu, Qizhen Sun. Ultra-high resolution strain sensor network assisted with an LS-SVM based hysteresis model[J]. Opto-Electronic Advances, 2021, 4(5): 200037-1
- Opto-Electronic Advances
- Vol. 4, Issue 5, 200037-1 (2021)
Abstract
Introduction
Discovering the physics and dynamics of the solid earth is essential to meet the challenges of natural hazards, energy crisis, and climate changes. Solid earth geoscience is a data-driven filed which demands large datasets of geological events
Recently, optical fiber strain sensor has attracted considerable research interests for geoscience applications, owing to their unique advantages of passive, multiplexing, and anti-electromagnetic interference
As an alternative approach, optical fiber distributed acoustic sensor (DAS), which offers a long sensing distance without blind area
In this paper, we demonstrated a high-resolution strain sensor network with large sensing capacity based on φ-OTDR technology and scatter enhanced points (SEPs) array. In the prototype system, the optical fiber with SEPs array is divided into sensing fiber and reference fiber. The reference fiber packaged with strain isolation is used to compensate the ultra-low frequency noise induced by laser source frequency shift and environmental temperature change. The characteristics of the above phase noise are systematically analyzed. Then, a hysteresis model based on the hysteresis operator and LS-SVM is introduced to reduce the thermal hysteresis between the sensing fiber and reference fiber. Assisted with the LS-SVM based hysteresis compensation scheme, a strain sensor network with high resolution in the ultra-low frequency and large sensing capacity is successfully achieved.
Experimental section
Experimental setup
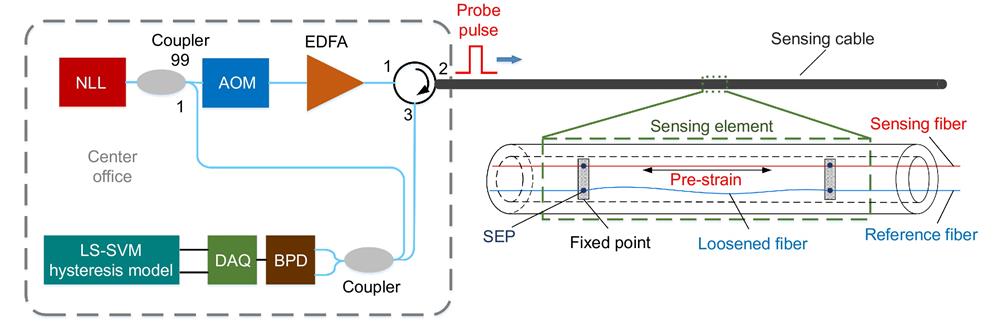
In order to achieve a large sensing capacity, the proposed high-resolution strain sensing network is interrogated by the φ-OTDR technology. The schematic diagram of the proposed sensing network for geoscience research is illustrated in Fig. 1. The sensing network consists of an interrogation office center and a special packaged sensing cable. In the interrogation system, an ultra-narrow linewidth laser (NKT x15) with linewidth of 100 Hz is used as a light source which is divided into a local oscillator laser and a probe laser by a 99:1 optical coupler. The probe laser is modulated into a series of pulses with frequency shift of 200 MHz by the acoustical optical modulator (AOM). After amplified by erbium doped fiber amplifier (EDFA), the pulses are injected into the sensing cable by a circulator. The backscattered light from the sensing cable is mixed with the local oscillator laser by a 50:50 coupler and then received by a balanced photodetector (BPD). Data acquisition card (DAQ) is used to acquire the heterodyne beat signals from the BPD.
![]()
Figure 1.
The sensing cable is based on the specific packaged optical fiber with SEPs array
where A is the amplitude of the interference signal, N is the number of the SEPs in the fiber, n0 is the refractive index of the fiber core, c is the light speed in the vacuum, τp is the pulse width of the probe laser, zn is the location of the n-th SEPs in the fiber, and φn is the phase of the scattering light of the n-th SEP. φn can be demodulated from the interference signal by the digital orthogonal phase discrimination method, which is deduced as:
where In(t) is the interference signal scattering from the n-th SEP. Theoretically, the phase difference between two SEPs is only dependent on the change of optical path in the sensing section
where k=1,2, ···, N−1 is the number of the sensing section in the fiber, ν is the optical frequency of the laser, and εk is the strain applied on the k-th sensing section. When ν and n0 are constant, the phase signal in the k-th sensing section will be only proportional to εk. However, it can be observed clearly that the phase signal of the sensing section φ(k) will be also influenced by variation of the laser frequency ν and refractive index n0. Generally, the laser frequency ν will shift along with the environmental temperature drift, and the refractive index n0 is also significantly influenced by the temperature variation of the fiber core. Thus, the laser frequency shift and fiber temperature fluctuation are the dominant noise sources in the ultra-low frequency domain.
In the proposed strain sensor network, a reference fiber with strain isolated package is employed to compensate the phase noise in low frequency band induced by environmental temperature and laser frequency shift. The compensation efficiency is dependent on the phase relationship between the sensing channel and corresponding reference channel. In order to investigate the phase variation characteristics, the laser frequency variation and temperature change were applied on the sensing cable for test. When the laser frequency variation with amplitude of 600 MHz and frequency of 1 Hz was introduced by frequency demodulation, the phase change of the sensing part and reference part are respectively plotted in the Fig. 2(a). The phase waveforms of the sensing channel and reference channel are identical with the variation of the laser frequency. Moreover, the relationship of the phase change between the sensing channel and reference channel is linear, which is illustrated in Fig. 2(b). Therefore, the phase noise induced by laser frequency shift can be compensated by direct differentiation.
![]()
Figure 2.(
Furthermore, the temperature fluctuation and the corresponding phase change are plotted in the Fig. 3(a), where the trigonometric temperature fluctuation with the amplitude of 5 °C was applied by a TEC. From Figs. 3(b) and 3(c), the hysteresis phenomenon can be observed between the temperature and phase. Moreover, the relationship between the phase change of the sensing channel and reference channel also exhibits an obvious hysteresis characteristic, as shown in the Fig. 3(d). The hysteresis stems from different temperature features induced by the different package methods, which will bring about a significant compensation error by direct differentiation. Therefore, a precision hysteresis model between the sensing channel and reference channel should be built to reduce the temperature compensation error.
![]()
Figure 3.(
Hysteresis operator
Research on the hysteresis has a long history about a century. The Preisach model, which has been widely used for the modeling of hysteresis, has been developed based on incorporates relay operators
![]()
Figure 4.
where d(r, s) is the density function, Rs−r,s+r[∙] is the relay operator, r=(a2−a1)/2 is the half-width value, and s=(a1+a2)/2 is the mean value of the relay operator. A dividing curve, ψ(r, t), is defined to divide the relay operator into two distinct regions. The output value of the relay operator is +1 in the region below the curve and -1 in the region above the curve, respectively. The dividing curve ψ(r, t) can be considered as the play between two mechanical elements of relay. Therefore, a play operator Pr[x] is determined, and the corresponding input-output behavior is illustrated in Fig. 4(b). Mathematically, the play operator can be obtained by linear superposition of relay elements as follows
Therefore, the Preisach operator can be expressed as:
where
According to the general form in Eq. (7), the Preisach model can be decomposed into a continuous set of play operators and a one-to-one mapping function. Generally, the input-output relationship of the Preisach model can be defined as:
where F(∙) is a function that maps the play operators set in the real-valued output y(t). Thus, the Preisach model can be implemented by approximating the mapping function based on the input and output value of real hysteresis materials through some identification methods, such as nonnegative least squares.
Least square support vector machine model
Least square support vector machine (LS-SVM) has been successfully introduced in modeling application for the global optimization property
where f(u) is the nonlinear mapping from the input space to higher feature space,
where C is the regularization parameters, and ξi is the error between the actual output and predictive output. The problem can be solved by defining the Lagrangian equation as follow:
where ai is the Lagrangian multiplier. The conditions for optimality are the saddle point of L, which can be found by solving the partial derivatives. After eliminating the
where
where K(ui, uj) is the kernel function, which can be used to avoid the computation of the mapping function f(u). Thus, the LS-SVM model for function regression can be formulated as:
where ak and b are the solutions of the Eq. (13). The kernel function must satisfy the Mercer condition
where σ is the width parameter of the KBF kernel. Therefore, for preassigned hyperparameter σ and C, the mapping function can be determined through Eq. (13). Moreover, the hyperparameters σ and C determine the generalization ability and complexity of the LS-SVM model, which should be optimized to ensure a high modeling accuracy along with high testing accuracy.
LS-SVM based hysteresis model
To establish a Preisach model, the density function d(r, s) of the model should be approximated from real hysteresis loops. In the classical Preisach model, the model parameters can be tuned by two approaches. One approach is predefined mathematical forms with a few free parameters
![]()
Figure 5.
where |x|max is the maximum absolute value of the input x(t). The number of the hysteresis play operator m determines the modeling accuracy and complexity of the hysteresis model. Additionally, due to that the classical Preisach model is a rate-independent hysteresis model, the rate of the input signal
where
where r is the threshold value of the play operator. After converting the model input x(t) into the discrete paly operators, the operator vectors set are used to obtain the memoryless function F(∙) through the memoryless mapping function, which is established by a LS-SVM. The LS-SVM is trained though the Eq. (13) with the given training data. The hyperparameters σ and C of the LS-SVM are tuned by the k-fold cross-validation to ensure the high generalization ability of the hysteresis model.
Results and discussion
In the experiment, an optical fiber with 112 SEPs array is enclosed in the sensing cable with the packaging method as shown in Fig. 1. The SEPs array possess -45 dB reflectivity with an interval of 5 m. When a probe laser pulse is injected into the sensing cable, the coherent beat signals backscattering from the sensing cable are recorded in Fig. 6(a). It is obvious the backscattering signal has 112 stable beat frequency pulses with high SNR, corresponding to 112 SEPs. The former 56 beats frequency pulses scattering from the SEPs belong to the sensing fiber and the latter part come from the reference fiber. As the sensing principle describes above, the 56 beat frequency pulses from the sensing fiber or reference fiber can compose into 55 sensing channels Si (1≤i≤55) and 55 reference channels Ri (1≤i≤55), respectively. The sensing channel Si and the corresponding reference channel Rj (j=56-i) are combined into a sensor element. Therefore, the proposed strain sensor network can interrogate a sensing cable with 55 sensing elements. To calibrate the strain sensitivity of the sensor elements, the static strain from 2 με to 20 με with a step of 2 με is applied to the sensor element 28 at the end of the sensing cable by a precision displacement stage. The relationship between the phase change and the applied strain amplitude is illustrated in Fig. 7, which presents a high sensitivity of -47.04 rad/με and high precision with R-square over 0.999.
![]()
Figure 6.(
![]()
Figure 7.The relationship between phase change and strain.
To train the hysteresis model between the sensing channel and reference channel, a triangular-wave temperature with the same period and variable rate was applied to the sensor element 28, which is shown as the red line in Fig. 8(a). The triangular-wave temperature fluctuation used to train the LS-SVM model can provide a temperature change with different input rate, which can construct a complete set of training data. The corresponding phase of the sensing channel and reference channel are also plotted in the Fig. 8(a), respectively. The relationship between the sensing channel and reference channel is illustrated as the color scatter distribution in Fig. 8(b). The hysteresis loops curve reveals that the thermal hysteresis characters of the strain sensor is dependent on the change rate of the applied temperature. The larger change rate of the temperature will introduce the wider hysteresis loop. Therefore, the thermal hysteresis of the proposed strain sensor is a rate-dependent hysteresis model. The phase signal of the reference channel is set as the input of the proposed LS-SVM based hysteresis model, while the phase signal of the sensing channel is the output. The regression result of the LS-SVM based hysteresis model is plotted as the black line in Fig. 8(b). The results prove the highly regression accurate for the thermal hysteresis modeling. The modeling error of the LS-SVM based hysteresis model is also exhibited in the Fig. 8(c). Compared to the large compensation error of the direct differential method, the root mean squared error (RMSE) between the LS-SVM model output and phase signal of the sensing channel is less than 0.095 rad.
![]()
Figure 8.(
After training the hysteresis model by the hysteresis operator LS-SVM, the phase signal of the sensing channel is compensated by the trained hysteresis model. To estimate the compensation accuracy of the hysteresis model, the sensor element 28 is applied with a temperature fluctuation with amplitude of 5 °C, and strain signal with frequency of 0.01 Hz and amplitude of 20 nε. The original signals of the sensing channel and reference channel are plotted in the Fig. 9(a). The compensation result of the directly differential method and hysteresis model are illustrated in Fig. 9(b), respectively. It can be seen that the measured strain signal by the direct differentiation method is almost buried in the phase noise induced by the temperature fluctuation. However, the strain signal can be observed clearly in the phase of the sensing channel compensated by the hysteresis model. Moreover, the power spectrum density (PSD) of the original signal, compensated signals by direct differential method and hysteresis model is exhibited in the Fig. 9(c). In the PSD of the original signal and signal compensated by direct differentiation, the signal peak of strain vibration at 0.01 Hz is almost buried in the noise peaks induced by the temperature fluctuation. However, after compensating by LS-SVM based hysteresis model, the signal of the strain vibration can be obtained more clearly, and the signal to noise ratio (SNR) of a strain vibration at 0.01 Hz greatly increases by 24 dB compared to that of the sensing fiber for direct compensation. Moreover, the bias drift induced by the laser frequency shift is also suppressed compared with the uncompensated original signal.
![]()
Figure 9.(
Additionally, to evaluate the strain resolution of the proposed strain sensor network, the sensing cable is placed in a quiet environment and isolated with vibration and strain. The original phase signals of the sensing channel and reference channel from sensor element 28 are plotted in Fig. 10(a), where a severe phase drift induced by the environment temperature change and laser frequency variation is observed. The compensated phase in time domain and frequency domain are illustrated in Figs. 10(b) and 10(c) respectively. The sine wave phase noise in the sensing channel and reference channel with frequency nearly 0.001 Hz is introduced by the air conditioner system in the lab, which will control the room temperature with fixed period. The bias drift of the sensing channel in time domain is eliminated by compensating with the LS-SVM based hysteresis model. In the frequency domain, the noise PSD below 0.1 Hz is suppressed clearly by compensation. Compared to the compensation method by direct differentiation, the noise of the compensated sensor by LS-SVM hysteresis model is further suppressed by 20 dB below 0.01 Hz. For compensation by hysteresis model, the phase power spectral density of the compensated sensor element is better than Sp(f)=5.01×10-4 rad·Hz-1/2 in the frequency range above 10 Hz, corresponding to a minimum dynamic strain resolution of 10.5 pε·Hz-1/2. Moreover, the phase noise power spectral density below 0.01 Hz even at 0.001 Hz is superior to 0.251 rad·Hz-1/2, which suggests the ultra-low frequency strain resolution of 166 pε @ 0.001 Hz. Remarkably, the quasi-static sensing resolution in mHz range of the strain sensor network can compete with the high-quality single point fiber sensor. Moreover, the sensor network proves a 55 sensor elements access capacity in the experiment and possesses a potential sensing capacity up to thousands of sensing channels which can match with the DAS system. It is the first reported strain sensor network to have sub-nε resolution in mHz frequency range along with ultra-large sensing capacity to the best of our knowledge. The large sensing capacity along with ultra-high quasi-static sensing resolution makes the proposed strain sensor network has potential applications in geoscience research.
![]()
Figure 10.(
Conclusions
We have demonstrated an ultra-high resolution strain sensor network based on φ-OTDR technology and SEPs array fiber. To reduce the ultra-low frequency noise induced by the laser frequency shift and temperature field change, the phase of the sensing fiber is compensated by the reference fiber with strain isolated package. The hysteresis operator based LS-SVM hysteresis model is introduced to reduce the thermal hysteresis nonlinearity between the sensing fiber and reference fiber. After compensated by the hysteresis model, the SNR of a sinusoidal strain vibration with a frequency of 0.01 Hz increase by 24 dB compared with direct compensation, which proves the compensation accuracy of the LS-SVM hysteresis model. Moreover, the phase noise level in the quilt environment presents a high dynamic resolution of 10.5 pε·Hz-1/2 in the frequency range above 10 Hz, and ultra-low frequency sensing resolution of 166 pε at 0.001 Hz. The high resolution in the ultra-low frequency and the large sensing capacity make the strain sensor network play an irreplaceable role in the geoscience research.
References
[1] KJ Bergen, PA Johnson, Hoop de, GC Beroza. Machine learning for data-driven discovery in solid Earth geoscience. Science, 363, eaau0323(2019).
[2] QW Liu, T Tokunaga, ZY He. Ultra-high-resolution large-dynamic-range optical fiber static strain sensor using Pound–Drever–Hall technique. Opt Lett, 36, 4044-4046(2011).
[3] CL Asheden, JM Lindsay, S Sherburn, IEM Smith, CA Miller, et al. Some challenges of monitoring a potentially active volcanic field in a large urban area: Auckland volcanic field, New Zealand. Nat Hazards, 59, 507-528(2011).
[4] EE Davis, M Heesemann, A Lambert, JH He. Seafloor tilt induced by ocean tidal loading inferred from broadband seismometer data from the Cascadia subduction zone and Juan de Fuca Ridge. Earth Planet Sci Lett, 463, 243-252(2017).
[5] T Kimura, H Murakami, T Matsumoto. Systematic monitoring of instrumentation health in high-density broadband seismic networks. Earth Planets Space, 67, 55(2015).
[6] WZ Huang, WT Zhang, YB Luo, L Li, WY Liu, et al. Broadband FBG resonator seismometer: principle, key technique, self-noise, and seismic response analysis. Opt Express, 26, 10705-10715(2018).
[7] P Jiang, LN Ma, ZL Hu, YM Hu. Low-crosstalk and polarization-independent inline interferometric fiber sensor array based on fiber Bragg gratings. J Lightw Technol, 34, 4232-4239(2016).
[8] ZY Zhao, M Tang, C Lu. Distributed multicore fiber sensors. Opto-Electron Adv, 3, 190024(2020).
[9] BZ Wang, DX Ba, Q Chu, LQ Qiu, DW Zhou et al. High-sensitivity distributed dynamic strain sensing by combining Rayleigh and Brillouin scattering. Opto-Electron Adv, 3, 200013(2020).
[10] P Jousset, T Reinsch, T Ryberg, H Blanck, A Clarke, et al. Dynamic strain determination using fibre-optic cables allows imaging of seismological and structural features. Nat Commun, 9, 2509(2018).
[11] JB Ajo-Franklin, S Dou, NJ Lindsey, I Monga, C Tracy, et al. Distributed acoustic sensing using dark fiber for near-surface characterization and broadband seismic event detection. Sci Rep, 9, 1328(2019).
[12] A Masoudi, TP Newson. Contributed review: distributed optical fibre dynamic strain sensing. Rev Sci Instrum, 87, 011501(2016).
[13] ZN Wang, L Zhang, S Wang, NT Xue, F Peng, et al. Coherent Φ-OTDR based on I/Q demodulation and homodyne detection. Opt Express, 24, 853-858(2016).
[14] D Chen, QW Liu, ZY He. High-fidelity distributed fiber-optic acoustic sensor with fading noise suppressed and sub-meter spatial resolution. Opt Express, 26, 16138-16146(2018).
[15] MS Wu, XY Fan, QW Liu, HY He. Highly sensitive quasi-distributed fiber-optic acoustic sensing system by interrogating a weak reflector array. Opt Lett, 43, 3594-3597(2018).
[16] GH Liang, JF Jiang, K Liu, S Wang, TH Xu, et al. Phase demodulation method based on a dual-identical-chirped-pulse and weak fiber Bragg gratings for quasi-distributed acoustic sensing. Photonics Res, 8, 1093-1099(2020).
[17] A Mateeva, J Lopez, D Chalenski, M Tatanova, P Zwartjes, et al. 4D DAS VSP as a tool for frequent seismic monitoring in deep water. Leading Edge, 36, 995-1000(2017).
[18] X Zhong, CX Zhang, LJ Li, S Liang, Q Li, et al. Influences of laser source on phase-sensitivity optical time-domain reflectometer-based distributed intrusion sensor. Appl Opt, 53, 4645-4650(2014).
[19] F Zhu, XP Zhang, L Xia, Z Guo, YX Zhang. Active compensation method for light source frequency drifting in Φ-OTDR sensing system. IEEE Photonic Technol Lett, 27, 2523-2526(2015).
[20] Q Yuan, F Wang, T Liu, Y Liu, YX Zhang, et al. Compensating for influence of laser-frequency-drift in phase-sensitive OTDR with twice differential method. Opt. Express, 27, 3664-3671(2019).
[21] Handbook of Optical Fibers 1–46 (Springer, 2019); https://doi.org/10.1007/978-981-10-1477-2_20-1.
[22] H Li, QZ Sun, T Liu, CZ Fan, T He, et al. Ultra-high sensitive quasi-distributed acoustic sensor based on coherent OTDR and cylindrical transducer. J Lightw Technol, 38, 929-938(2020).
[23] Proc. Optical Fiber Communications Conference (IEEE, 2019). https://doi.org/10.1364/OFC.2019.Th2A.16.
[24] Proc. Optical Fiber Communications Conference (OSA, 2017). https://doi.org/10.1364/OFC.2017.W2A.19.
[25] S Bobbio, G Milano, C Serpico, C Visone. Models of magnetic hysteresis based on play and stop hysterons. IEEE Trans Magn, 33, 4417-4426(1997).
[26] P Ge, M Jouaneh. Generalized preisach model for hysteresis nonlinearity of piezoceramic actuators. Precis Eng, 20, 99-111(1997).
[27] Hysteresis and Phase Transitions (Springer, New York, 1996).
[28] JAK Suykens, J Vandewalle, Moor De. Optimal control by least squares support vector machines. Neural Netw, 14, 23-35(2001).
[29] Statistical Learning Theory (Johan Wiley & Sons, New York, 1998).
[30] ME Shirley, R Venkataraman. On the identification of Preisach measures. Proc SPIE, 5049, 326-336(2003).
[31] JÅ Stakvik, MRP Ragazzon, A Eielsen, JT Gravdahl. On implementation of the Preisach model: identification and inversion for hysteresis compensation. Model, Ident Control, 36, 133-142(2015).


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20