
Bin Zou, Siyang Lin, Zhishuai Yin. Semantic Mapping Based on YOLOv3 and Visual SLAM[J]. Laser & Optoelectronics Progress, 2020, 57(20): 201012
- Laser & Optoelectronics Progress
- Vol. 57, Issue 20, 201012 (2020)
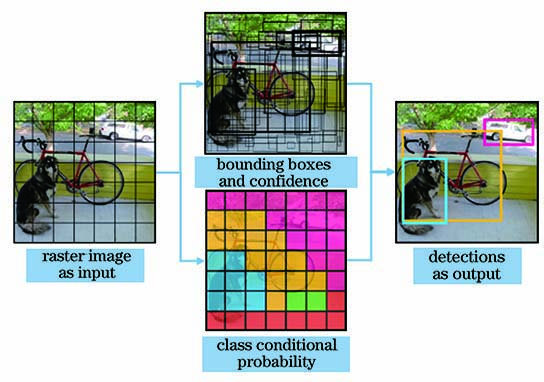
Fig. 1. Flow chart of YOLOv3 algorithm
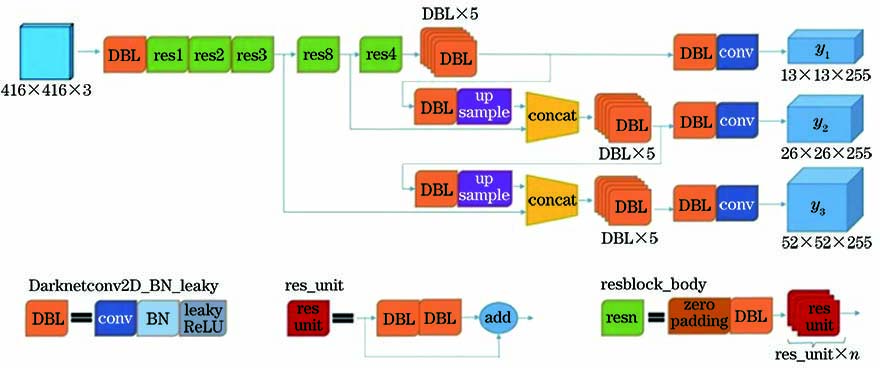
Fig. 2. Structure of YOLOv3
Fig. 3. Supervoxel clustering
Fig. 4. Graph segmentation of surface patches
Fig. 5. Object information label. (a) Original point cloud; (b) object detection; (c) semantic label
Fig. 6. Optimization of ORB characteristic point extraction. (a) Original ORB characteristic point extraction; (b) optical flow tracking ORB characteristic point
Fig. 7. Comparison of point cloud segmentation results. (a) Algorithm 1; (b) algorithm 2; (c) proposed algorithm
Fig. 8. Verifying semantic map. (a) System operating in real-time; (b) original map; (c) semantic map
|
Table 1. Running time of different algorithms
| ||||||||||||||||||||||||||||||||||
Table 2. Comparison of experimental results of map construction

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20