Journals >Chinese Journal of Lasers



- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0305001 (2019)


- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0306001 (2019)

- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0306002 (2019)

- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0309001 (2019)
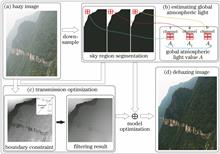
Aiming at the problems of image hue and brightness distortion in sky regions when dealing with fog images by the classic dark channel theory algorithm, we propose a fog image enhancement algorithm based on the boundary constraint weighted least squares filtering. According to the histogram property of fog image, we reduce the boundary condition and obtain the initial transmittance. The transmission is smoothed by weighted least squares filtering method and tolerance mechanism. The enhanced image is obtained by using the model of dark channel theory. The research results show that the proposed algorithm is better than the existing dark channel algorithm in terms of dehazing effect and image visibility.
.- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0309002 (2019)

- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0309003 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0301001 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302001 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302002 (2019)
- Publication Date: Mar. 07, 2019
- Vol. 46, Issue 3, 0302003 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302004 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302005 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302006 (2019)
- Publication Date: Mar. 07, 2019
- Vol. 46, Issue 3, 0302007 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302008 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302009 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302010 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302011 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302012 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302013 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302014 (2019)
- Publication Date: Mar. 07, 2019
- Vol. 46, Issue 3, 0302015 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0302016 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0303001 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0304001 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0304002 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0304003 (2019)
Aiming at the problem of underwater short-range detection of incoming targets, a random positioning method driven by fluid dynamics is proposed. The single-beam pulse laser driven by the navigation hydrodynamic force is used to dynamically scan, and the scanning periodic is recorded by the magnetic sensor. Based on the heavy tail function, the target echo equation is derived, and the magnetic dipole equivalent model of the magnetic detection system is established. The optical magnetic measurement signals are calculated respectively by using the peak detection method and the threshold detection method. The underwater short-range target acquisition model and the azimuth detection accuracy equivalent model are established. The influence mechanism of laser emission power, pulse width, threshold, and noise on measurement accuracy is studied. The results show that the azimuth measurement accuracy and target capture rate increase with the increase of the laser emission power, and decrease with the increase of the pulse width and the receiving circuit noise voltage. The azimuth measurement accuracy reaches the maximum when the detection threshold is 300 mV. The capture rate varies slightly with the increase of the threshold. When the threshold is close to the peak of the echo pulse, the target capture rate decreases rapidly.
.- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0304004 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0304005 (2019)
ing at the low precision problem of the three-dimensional shape robot measurement system composed of industrial robots and topographic sensors, a three-dimensional shape complex curved surface measurement system based on iGPS (indoor global positioning system) is proposed. The overall design scheme of the proposed measurement system is introduced and a mathematical model is established for it. Experiments on length measurement accuracy and repeated measurement accuracy are carried out. The experimental results verify the accuracy and reliability of this measurement system for large-scale complex curved surface topography measurement. The shape measurement of large-sized workpiece with double arched surface is carried out. The measurement results verify the feasibility of this measurement system.
.- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0304006 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0304007 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0313001 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0308001 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0300001 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0311001 (2019)
- Publication Date: Mar. 07, 2019
- Vol. 46, Issue 3, 0311002 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0311003 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0311004 (2019)
- Publication Date: Mar. 06, 2019
- Vol. 46, Issue 3, 0311005 (2019)
- Publication Date: Mar. 07, 2019
- Vol. 46, Issue 3, 0311006 (2019)
