
Xuan He, Shuguo Pan, Yong Tan, Wang Gao, Hui Zhang. Visual-Inertial Odometry and Global Navigation Satellite System Location Algorithm Based on Point-Line Feature in Outdoor Scenes[J]. Laser & Optoelectronics Progress, 2022, 59(18): 1815002
- Laser & Optoelectronics Progress
- Vol. 59, Issue 18, 1815002 (2022)
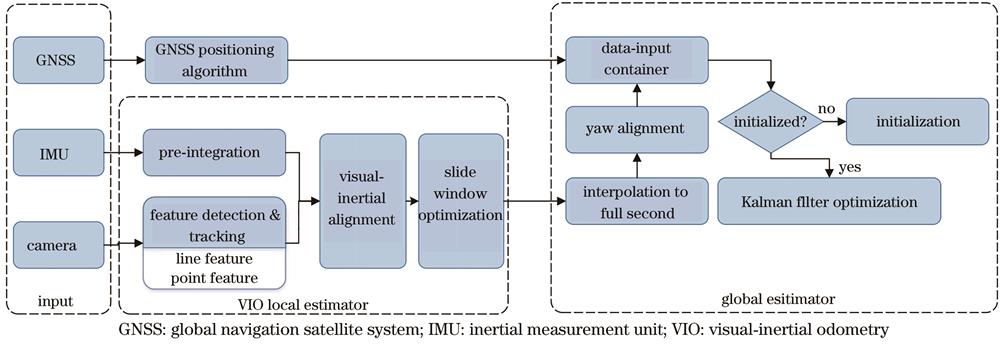
Fig. 1. General framework of proposed algorithm
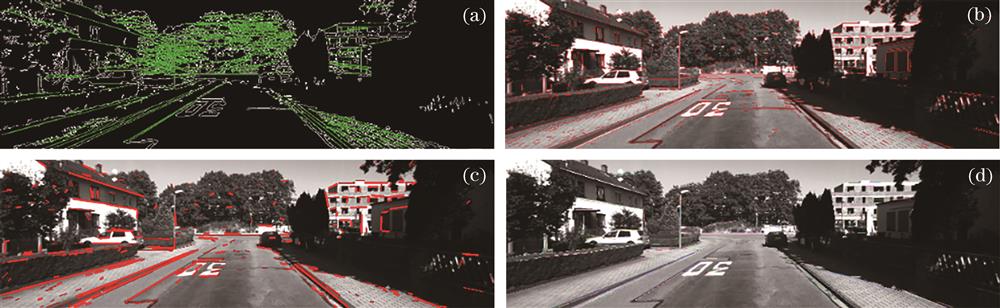
Fig. 2. Line feature extraction results and time consumption of each algorithm in measured environment. (a) Hough algorithm (118.045 ms); (b) LSD algorithm (62.7 ms); (c) LSWMS algorithm (40 ms); (d) EDLine algorithm (18.2 ms)
Fig. 3. Possible changes in same line feature between two consecutive frames. (a) Existence of slight angles; (b) existence of slight distances
Fig. 4. Schematic diagram of coordinate frame involved in proposed system
Fig. 5. Platform for actual measurement data acquisition
Fig. 6. Line feature matching results of traditional LSD algorithm and proposed algorithm. (a) LSD algorithm; (b) proposed algorithm
Fig. 7. Trajectory fitting curves of KITTI data set experiments. (a) 09_30_0018 data set; (b) 09_30_0027 data set
Fig. 8. APE root mean square error (APE_RMSE) comparison curves of KITTI data set experiments. (a) 09_30_0018 data set;
Fig. 9. APE_RMSE comparison curves of tunnel data set experiments. (a) Tunnel 1 data set; (b) Tunnel 2 data set
Fig. 10. Trajectory fitting curves of urban road data set experiment. (a) Urban road data set; (b) road of test field data set
Fig. 11. APE_RMSE comparison curves of urban road data set experiment. (a) Urban road data set; (b) road of test field data set
|
Table 1. Comparison of APE_RMSE of each algorithm in KITTI data set
|
Table 2. Comparison of APE_RMSE of each algorithm in tunnel data set
| |||||||||||||||||||||||||||||||||||
Table 3. Positioning performance comparison of APE_RMSE of each algorithm in urban road data set
|
Table 4. Comparison of real-time performance of proposed algorithm with PL-VIO algorithm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20