A measurement system for geometric parameters of the catenary on rolling stocks is investigated with the multi-view stereo vision technology and then used to measure geometric parameters, such as stagger and contact wire height. The geometric parameters of the catenary are the basic detection content of China's power supply safety inspection and monitoring system for high-speed railways (the 6C system). They are also important parameters to ensure the safe operation of electrified railways. The current measurement methods include the laser scanning methods, such as the one based on structured-light stereo vision and the one based on binocular stereo vision. These methods are weakened by several limitations in the on-board measurement of the geometric parameters of the catenary, such as the low scanning frequency and measurement resolution, the influence of sunlight, and the difficulty in matching homonymous points. Therefore, this paper attempts to propose a multi-view stereo vision technology with line-scan cameras to perform the on-board measurement of the geometric parameters of the catenary. A new kind of high-speed synchronized stroboscopic lighting technology for stereo vision-based measurement is developed to improve the resistance to sunlight interference, enhance image quality, and reduce the power consumption of the measurement system. A measurement model and a matching method for stereo vision with line-scan cameras are proposed. A method of compensating vehicle vibration with two-dimensional laser sensors and the corresponding model for vehicle vibration compensation are constructed.
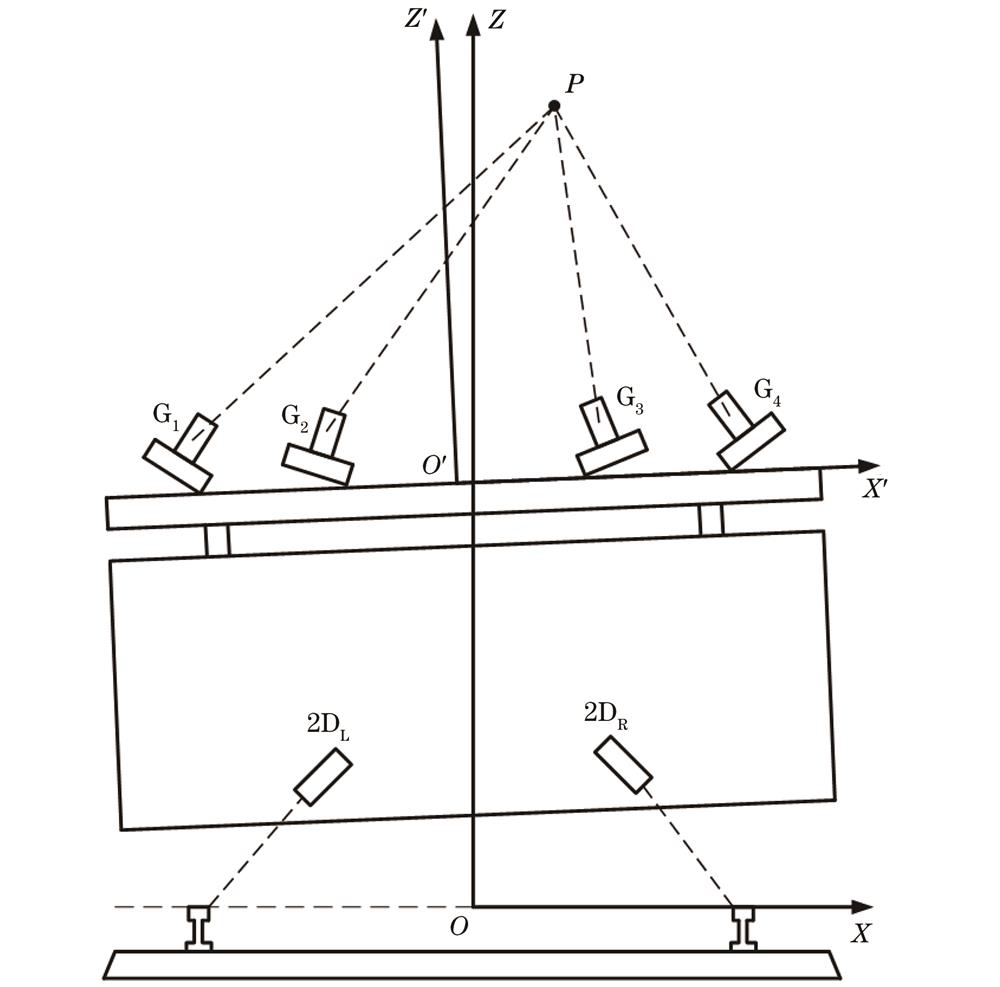
The measurement system is composed of two parts, i.e., a stereo vision-based measurement module on the train roof and a measurement module for vehicle vibration compensation at the bottom of the train. The stereo vision-based measurement module consists of four line-scan cameras. A line-scan camera model is developed by Euclidean space transformation and perspective projection transformation. A measurement model for geometric parameters, including stagger and contact wire height, relative to the train roof coordinate system is developed by applying the triangulation principle of stereo vision. A matching method based on the spatial location features of targets is proposed. Specifically, the targets' imaging coordinates in the third line-scan camera are used to check the matching between the image from the first line-scan camera and that from the second line-scan camera, thereby quickly eliminating the uncertainty caused by binocular image matching. The measurement module for vehicle vibration compensation includes two two-dimensional laser sensors and measures the three spatial attitude parameters of the train body relative to the rail surface coordinate system, including the roll angle, the lateral relative displacement, and the vertical relative displacement. The geometric parameters (stagger and contact wire height) of the contact wire relative to the rail surface coordinate system are calculated by synthesizing the measurement data of both the stereo vision-based measurement module and the measurement module for vehicle vibration compensation. A light-emitting diode (LED) lamp based on stroboscopic lighting technology is proposed as an alternative light source. The high-speed synchronization of lighting and camera exposure is achieved by sharing the same trigger pulse produced by an encoder mounted on the train wheel. A blue LED lamp with a narrow-bandpass optical filter is proposed to minimize the influence of sunlight on imaging. The image signal-to-noise ratio (SNR) in a complex environment is significantly improved, and the power consumption of the measurement system is greatly reduced.
Specifically, a calibration tool with a horizontally arranged calibration target array is designed to achieve high positioning accuracy of calibration targets (Fig. 8). The horizontally arranged calibration target array includes 11 targets equally spaced at 100 mm apart. At a certain height, the images of the 11 calibration points with different horizontal coordinates in the global coordinate system are captured. The calibration target array can be moved up and down to obtain calibration points with different vertical coordinates in the global coordinate system. The values of the parameters in the implicit parameter matrix of the line-scan cameras are calculated by Eq. (2) (listed in Table 1). The average deviations of the calibration point' reprojection obtained with the four line-scan cameras are 0.79 pixel, 0.95 pixel, 0.97 pixel, and 0.84 pixel, respectively. The proposed measurement system is installed on a dedicated inspection vehicle. The field test is performed on a high-speed railway line. The contact wire and the background can be well distinguished by first-order difference processing of the image (Fig. 10). The pixel coordinate of the midpoint of the contact wire's bottom surface is determined by locating the edges on both sides of the contact wire's bottom surface. The position of the contact wire relative to the train-roof coordinate system is calculated with the proposed stereo vision-based measurement model. Then, the position of the contact wire relative to the rail surface coordinate system is calculated by the vehicle vibration compensation method. The values of roll angle and lateral relative displacement of the train body both increase from near zero when the inspection vehicle travels from the straight-line section to the curved-line section. In contrast, the deviation of the vertical relative displacement of the train body is small (listed in Table 2). The comparison between dynamic test results and ground measurement results indicates that the measurement errors in stagger and contact wire height are both smaller than 10 mm (listed in Table 3). The test demonstrates that the proposed measurement system can be used both in the low-speed static inspection of a newly built catenary system and in the cyclic dynamic inspection of an operating catenary system.
This paper proposes a measurement system for the geometric parameters of the catenary on rolling stocks based on multi-view stereo vision technology. The proposed system can measure geometric parameters, including stagger and contact wire height. The blue LED lamp based on stroboscopic lighting technology is investigated. Compared with the traditional measurement device using the high-intensity discharge (HID) lamp, the proposed device significantly improves the image signal-to-noise ratio in a complex environment and greatly reduces the power consumption of the measurement system. A measurement model for the geometric parameters of the catenary is developed, and it is composed of a stereo vision-based measurement model and a model for vehicle vibration compensation. A matching method for stereo vision with line-scan cameras is proposed. It uses the third line-scan camera to compare the reprojected points of each space point with the actual extracted points from image processing to quickly remove the pseudo-objects. The dynamic test results indicate that the measurement errors in stagger and contact wire height are both smaller than 10 mm. The test demonstrates that the proposed measurement system satisfies the application requirement of the 6C system.