
Shaojie Chen, Zhencai Zhu, Yonghe Zhang, Ming Guo, Shuai Zhi. Extrinsic Calibration for Lidar and Stereo Vision Using 3D Feature Points[J]. Laser & Optoelectronics Progress, 2020, 57(3): 030102
- Laser & Optoelectronics Progress
- Vol. 57, Issue 3, 030102 (2020)
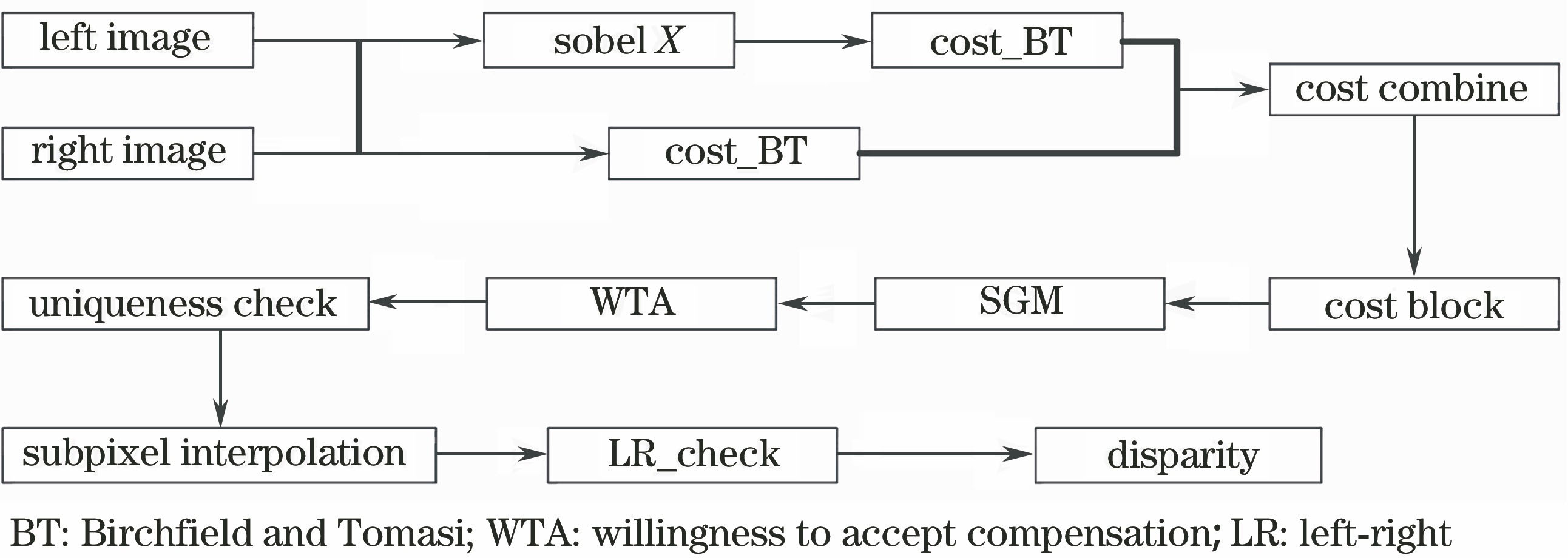
Fig. 1. SGBM algorithm framework
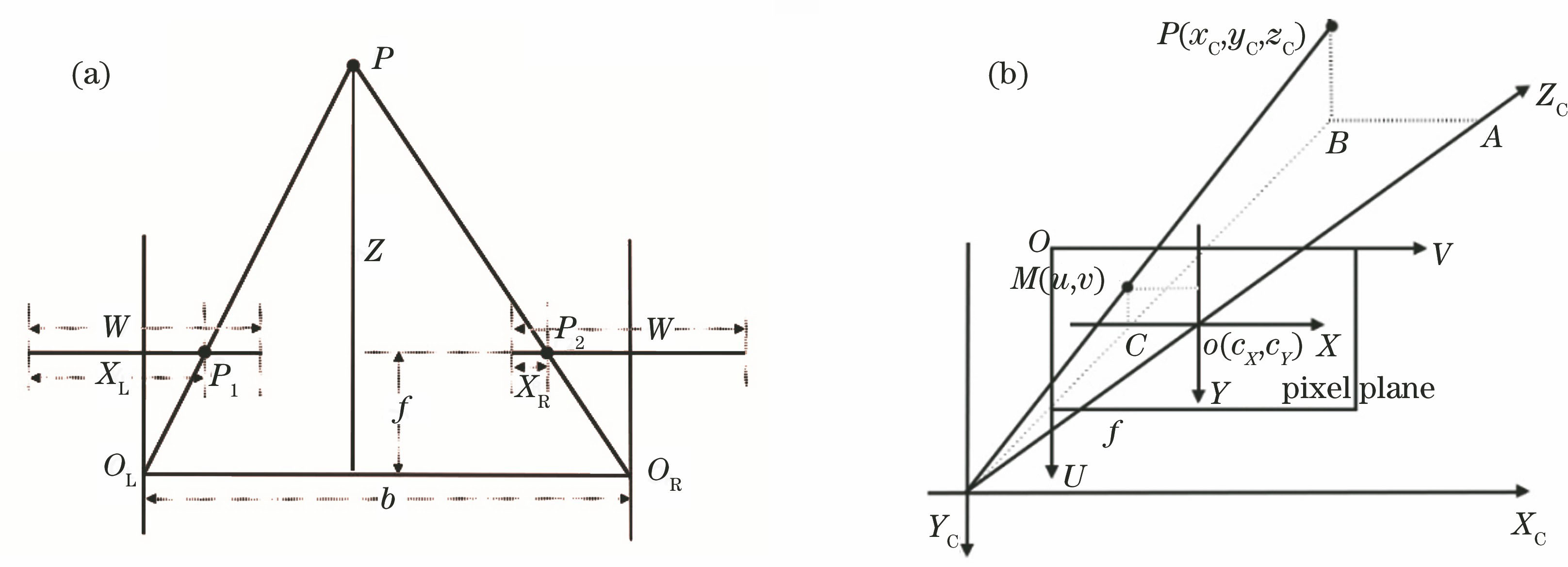
Fig. 2. Imaging system. (a) Geometric relationship between parallax and depth; (b) getting spatial points from pixel coordinates
Fig. 3. Experimental device diagram. (a) Board layout; (b) layout of lidar and binocular camera
Fig. 4. Edge extraction. (a) (b) Edge extraction results of different perspectives of binocular camera; (c) frame selection of lidar point cloud
Fig. 5. Point cloud fusion results from different perspectives in two scenes. (a) (b) Scene one; (c)(d) scene two
Fig. 6. Results of lidar point cloud reprojection
Fig. 7. Point cloud fusion of two different perspectives of binocular camera. (a)(b) Left view of two perspectives; (c) result of the point cloud fusion
Fig. 8. Fusion results of method in Ref. [4]. (a) Result of edge point extraction; (b) result of circle center extraction
Fig. 9. Fusion results of method in Ref. [4]. (a) Result 1; (b) another result

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20