
Hanbing Li, Chunyang Xu, Chaochao Hu. Improved Real-Time Vehicle Detection Method Based on YOLOV3[J]. Laser & Optoelectronics Progress, 2020, 57(10): 101507
- Laser & Optoelectronics Progress
- Vol. 57, Issue 10, 101507 (2020)
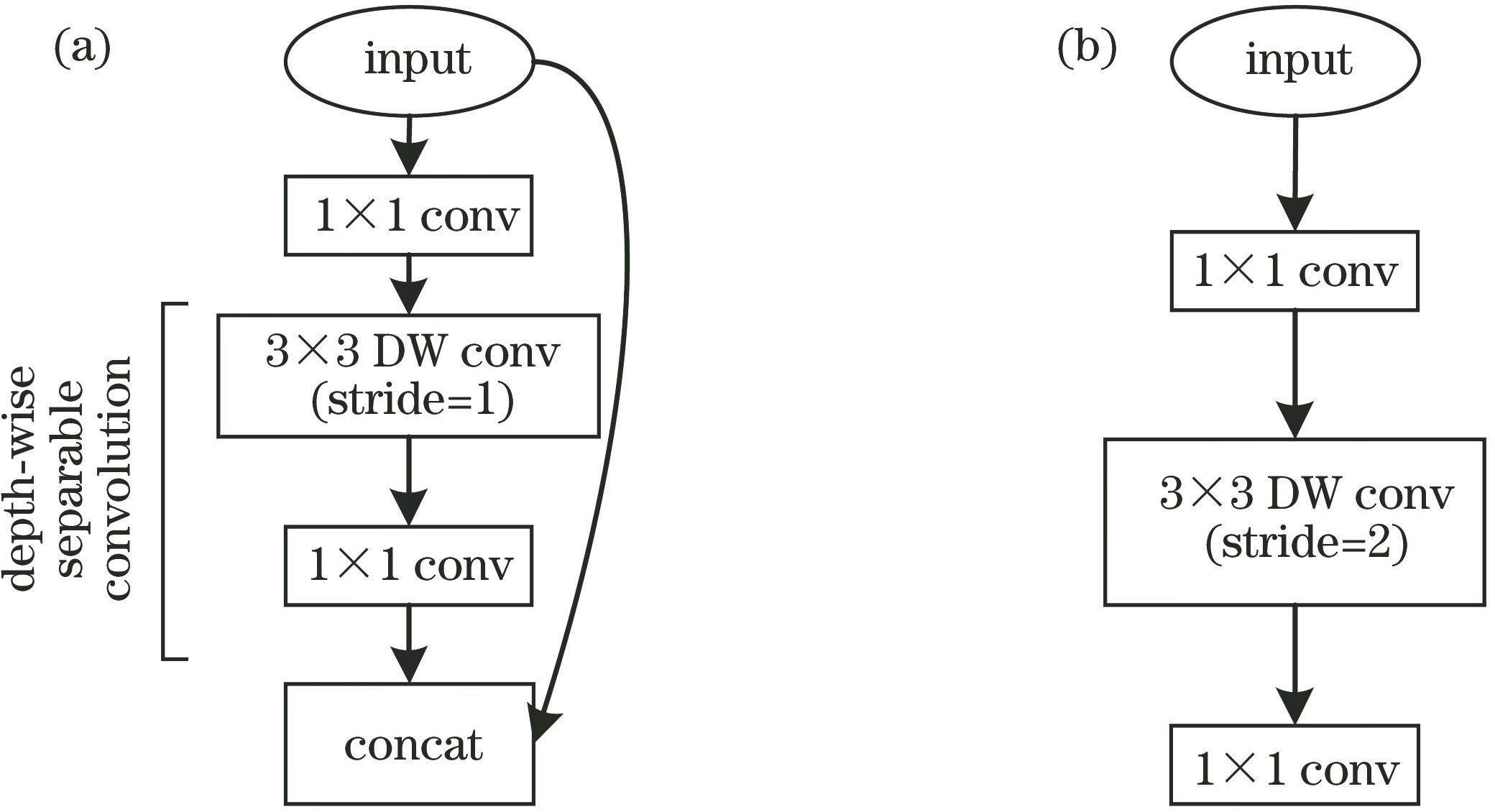
Fig. 1. Inverted residual network. (a) Stride is 1; (b) stride is 2
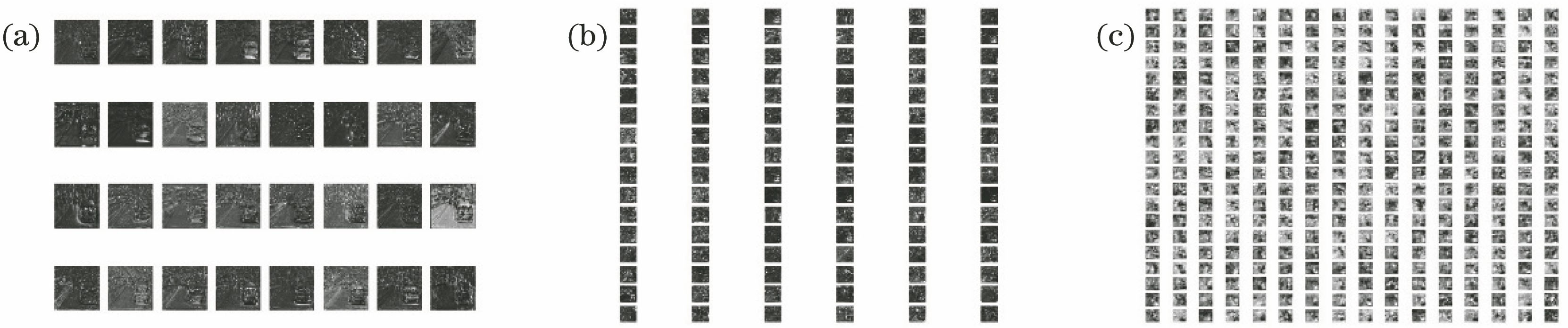
Fig. 2. Feature maps of different sizes in the last three layers of network. (a) 52×52; (b) 26×26; (c) 13×13
Fig. 3. Improved network structure
Fig. 4. P-R curves for different models
Fig. 5. Model detection results in different scenarios. (a) Original images; (b) detection results of YOLOV3; (c) detection results of improved model
|
Table 1. Comparison of network layers and sizes of different models
|
Table 2. Influence of different improvement strategies on mAP
|
Table 3. Comparison of test results of different models

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20