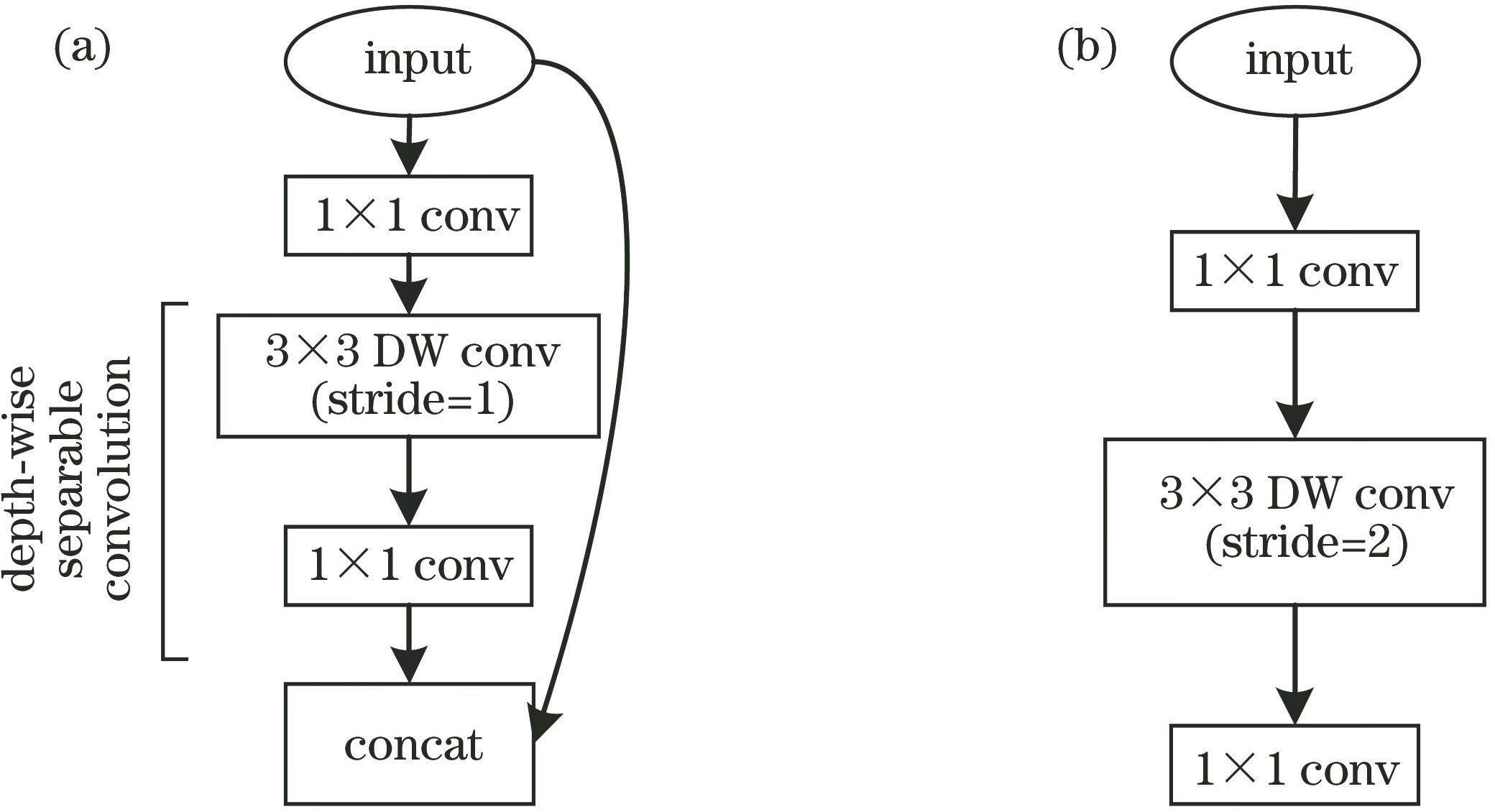
ing at the problem of low real-time performance of original YOLOV3 target detection algorithm in vehicle detection tasks, this paper proposes an improved vehicle detection model. In order to reduce the number of parameters, reduce the computational complexity, and solve the problem of gradient disappearance and gradient explosion, the model uses the inverted residual network as the basic feature extraction layer. In addition, group normalization is used to reduce the impact of batch size on the accuracy of the model. At the same time, softening non maximum suppression is used to reduce the rate of missed detection. Finally, the Focal-loss is used to improve the loss function so that the model focuses on the difficult-to-classify samples in the process of training. The parameter amount of the improved model is 36.23% of YOLOV3 model. The detection time per frame is reduced by 13.8 ms compared with YOLOV3, and the average category accuracy is improved by 1.15%. The results show that the proposed algorithm ensures both real-time performance and accuracy, and providing a reference for real-time detection of vehicles.

Hanbing Li, Chunyang Xu, Chaochao Hu. Improved Real-Time Vehicle Detection Method Based on YOLOV3[J]. Laser & Optoelectronics Progress, 2020, 57(10): 101507
