Journals >Laser & Optoelectronics Progress



- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101001 (2020)

- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101002 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101003 (2020)

- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101004 (2020)

- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101005 (2020)

- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101006 (2020)
ing at the problems that non-rigid registration of layered B-spline exists local extremum and the level set segmentation method is not suitable for noisy image segmentation, a joint segmentation and registration of medical image based on locally updated hierarchical B-spline bidirectional transformation and level set method is proposed. The proposed method adds a registration transformation to the segmentation algorithm, and the structure information of image segmentation is incorporated into the registration. The B-spline level set function is used to smooth the transformed and segmented image, and a two-way transformation is introduced in the registration to improve the accuracy and smoothness of the registration. Based on the level set method, the bi-directional layered B-spline transform is introduced to construct the joint energy functional of segmentation and registration, and the gradient descent method is used to minimize the energy functional to optimize the objective function. Experimental results show that the Dice metric is always above 99% and the mean square error is reduced by 30% compared with the single image segmentation method. The proposed method improves the registration accuracy and has better robustness in noise image segmentation.
.- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101007 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101008 (2020)
ing at the problem of the low accuracy of the Faster R-CNN algorithm in object detection, the data is enhanced first. Then, the extracted feature map is trimmed, and bilinear interpolation is used to replace the region of interest pooling operation. Soft-non-maximum suppression (Soft-NMS) algorithm is used for classification. Experimental results show that the accuracy of the algorithm is 76.40% and 81.20% in PASCAL VOC2007 and PASCAL VOC07+12 datasets, which is 6.50 percentage points and 8.00 percentage points higher than that of the Fast R-CNN algorithm, respectively. Without data enhancement, the accuracy on the COCO 2014 dataset is improved by 2.40 percentage points compared with that of the Faster R-CNN algorithm.
.- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101009 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101010 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101011 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101012 (2020)
ing at classification of carbon fiber reinforced polymer (CFRP) defect types, an ultrasonic one-dimensional convolutional neural network (U-1DCNN) is proposed and the Bayesian optimization algorithm is used to optimize hyperparameters. By automatically extracting the features of ultrasonic A-Scan signals, three defect types, i.e., delamination, gas cavity, and non-defect, are automatically distinguished. First, a dataset is constructed by collecting ultrasonic A-Scan signals. Then, multi-convolutional blocks are used to simultaneously extract as well as enhance the diversity of extracted features. Subsequently, one-dimensional residual units are stacked and connected, simplifying the training of the network while further extracting the features. The learning rate and momentum parameter of stochastic gradient descent of the network are optimized by Bayesian optimization algorithm. Finally, nonlinear mapping of the A-Scan signals and defects is realized. Experiment results show that U-1DCNN can recognize CFRP defects by automatically extracting features, with the accuracy reaching 99.50%.The recognition speed of U-1DCNN is faster than the two-dimensional CNN method, which is advantageous for defect detection.
.- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101013 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101014 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101015 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101016 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101017 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101018 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101019 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101020 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101021 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101022 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101023 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101101 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101102 (2020)
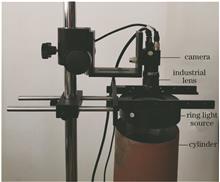
ing at the requirement of vibration measurement of thin-walled parts, the binocular vision is combined with the matching and tracking of features to realize a more accurate method for measuring the vibration of thin-walled parts. First, the vibration images of thin-walled parts were continuously collected using a binocular camera, and image pre-processing operations, such as filtration and binarization, were performed. Second, the first frame image captured using the left and right cameras was selected, and the feature points on the image were stereo-matched according to the principle of epipolar constraint. Then, the improved optical flow method was used to track the feature points of the first frame image to obtain accurate pixel coordinates of the feature points from the second to the last frame images. Finally, the three-dimensional vibration displacement information of the object was obtained based on the binocular vision measurement principle. Experimental research and analysis show that the proposed method can accurately extract the vibration displacement information of thin-walled parts, thereby providing a new technical reference for further research on vibration characteristic analysis, vibration-damping optimization design, and structural damage identification.
.- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101103 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101104 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101105 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101106 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101501 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101502 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101503 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101504 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101505 (2020)
show that the proposed method can sequentially distinguish the components of the mixture, and is a reliable method to identify the terahertz broadband spectral characteristics for these components.
.- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101506 (2020)
ing at the problem of low real-time performance of original YOLOV3 target detection algorithm in vehicle detection tasks, this paper proposes an improved vehicle detection model. In order to reduce the number of parameters, reduce the computational complexity, and solve the problem of gradient disappearance and gradient explosion, the model uses the inverted residual network as the basic feature extraction layer. In addition, group normalization is used to reduce the impact of batch size on the accuracy of the model. At the same time, softening non maximum suppression is used to reduce the rate of missed detection. Finally, the Focal-loss is used to improve the loss function so that the model focuses on the difficult-to-classify samples in the process of training. The parameter amount of the improved model is 36.23% of YOLOV3 model. The detection time per frame is reduced by 13.8 ms compared with YOLOV3, and the average category accuracy is improved by 1.15%. The results show that the proposed algorithm ensures both real-time performance and accuracy, and providing a reference for real-time detection of vehicles.
.- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101507 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101508 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101509 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 101510 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 102801 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 100001 (2020)
- Publication Date: May. 08, 2020
- Vol. 57, Issue 10, 100002 (2020)
