
Renzhong Li, Zhewen Liu. New Segmentation Method Combining Three-Dimensional Point Cloud Skeleton Points and Feature Points[J]. Laser & Optoelectronics Progress, 2020, 57(12): 121120
- Laser & Optoelectronics Progress
- Vol. 57, Issue 12, 121120 (2020)
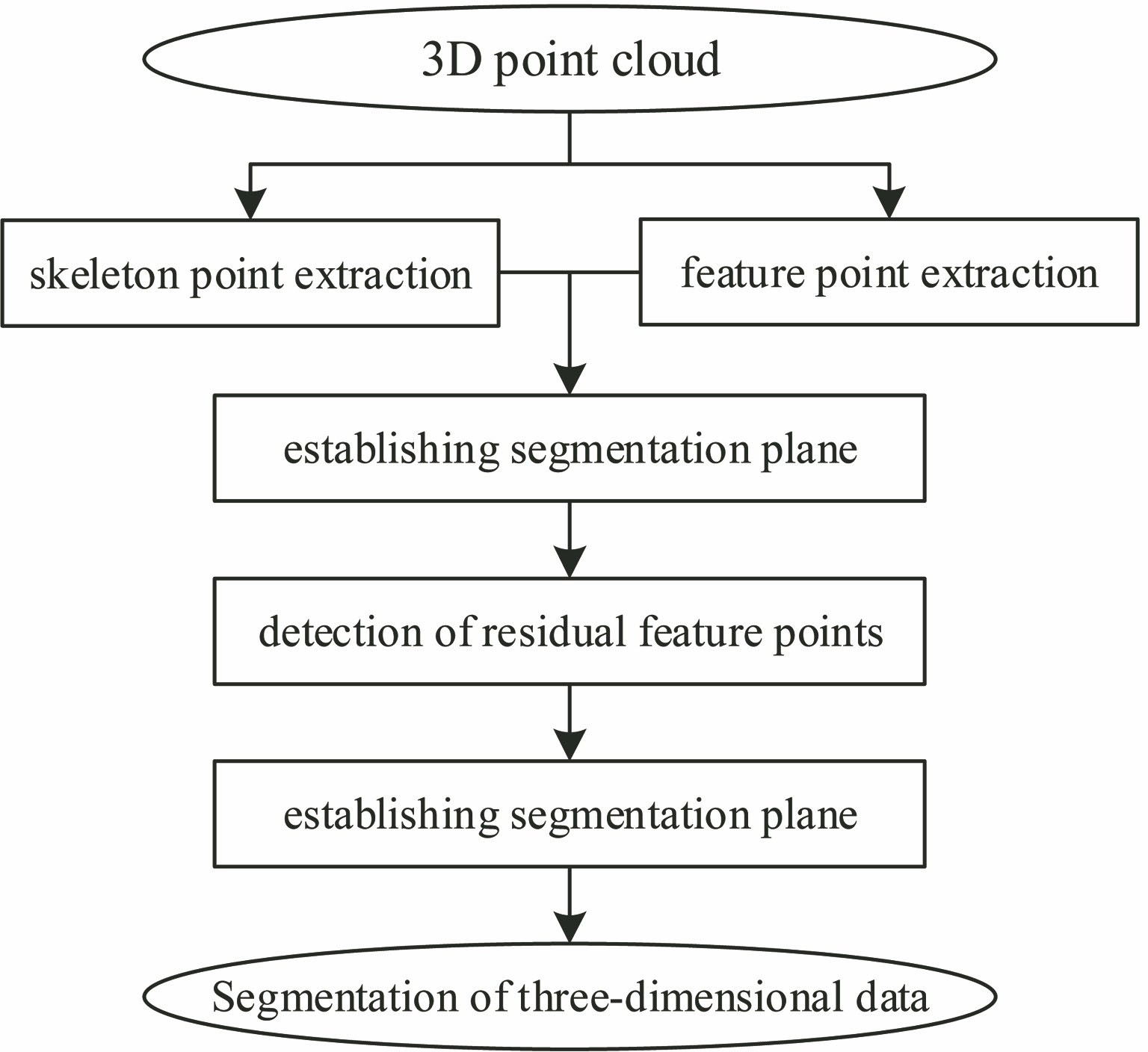
Fig. 1. Flow chart of algorithm

Fig. 2. Two-dimensional description and three-dimensional description. (a) Two-dimensional description; (b) three-dimensional description
Fig. 3. Segmentation effect. (a) Original point cloud data; (b) display of skeleton points and external feature points; (c) segmentation result
Fig. 4. Simulation results of dinosaur model. (a)(b) Proposed algorithm; (c) traditional algorithm in Ref. [11]
Fig. 5. Simulation results of ant model. (a)(b) Proposed algorithm; (c) traditional algorithm in Ref. [11]
Fig. 6. Simulation results of plane model. (a)(b) Proposed algorithm; (c) traditional algorithm in Ref. [11]
Fig. 7. Simulation results of hand model. (a)(b) Proposed algorithm; (c) traditional algorithm in Ref. [11]
Fig. 8. Simulation results of bird model. (a)(b) Proposed algorithm; (c) traditional algorithm in Ref. [11]
Fig. 9. Simulation results of sheep model. (a)(b) Proposed algorithm; (c) traditional algorithm in Ref. [11]
Fig. 10. Simulation results of giraffe model. (a)(b) Proposed algorithm; (c) traditional algorithm in Ref. [11]
Fig. 11. Simulation results of bear model. (a)(b) Proposed algorithm; (c) traditional algorithm in Ref. [11]
Fig. 12. Simulation results of shark model. (a)(b) Proposed algorithm; (c) traditional algorithm in Ref. [11]
Fig. 13. Simulation results of monster model. (a)(b) Proposed algorithm; (c) traditional algorithm in Ref. [11]

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20