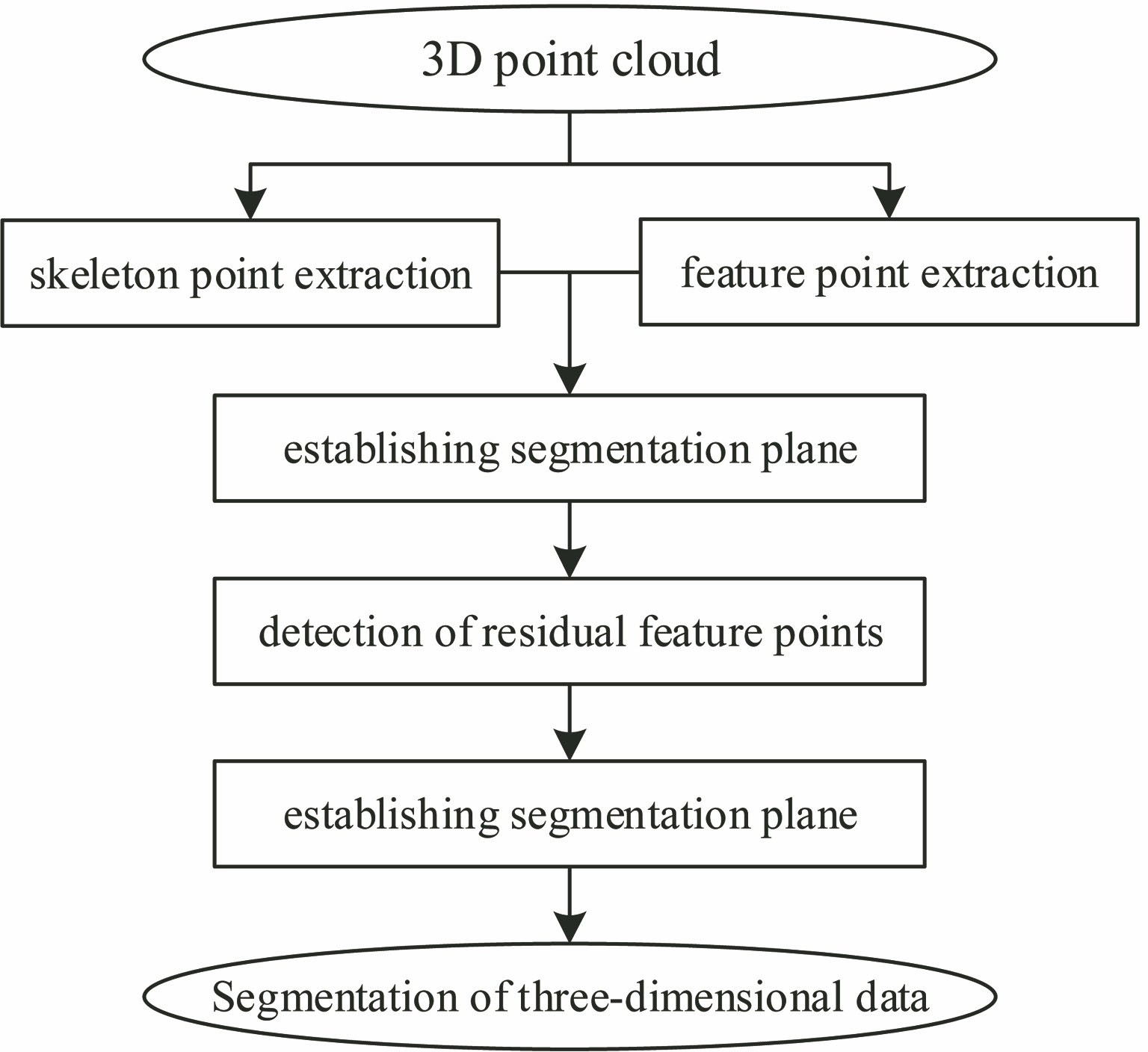
ing at the problem of low accuracy of the segmentation algorithm for three-dimensional (3D) point cloud data, a new segmentation algorithm combining point cloud skeleton points and external feature points is proposed. This method can effectively segment local small-scale convex objects, which cannot be segmented by traditional methods. This would make the segmentation of 3D point cloud data more perfect and provide a new idea for the segmentation of 3D point clouds. In this paper, C++ and its open source point cloud library are used to program. First, L1 median algorithm is used to extract skeleton points from 3D point clouds. At the same time, feature points are extracted by scale-invariant feature transform algorithm. Then, a segmentation plane is constructed based on skeleton points and feature points, segmentation is conducted, and the remaining feature points are detected. At last, a segmentation plane is constructed again for segmentation, therefore getting the final result. Experimental results show that the algorithm can efficiently segment small-scale convex surface of 3D point clouds and improve the accuracy of segmentation.

Renzhong Li, Zhewen Liu. New Segmentation Method Combining Three-Dimensional Point Cloud Skeleton Points and Feature Points[J]. Laser & Optoelectronics Progress, 2020, 57(12): 121120
