[3] Silberman N, Fergus R. Indo scene segmentation using a structured light sens[C]2011 IEEE international conference on computer vision wkshops (ICCV wkshops). IEEE, 2011: 601608.
[4] Ji Liu, Wenliang Zeng, Xiaosheng Liang. Depth assisted active contour segmentation algorithm. Application Research of Computers, 37, 287-290(2020).
[6] Zhang Y, Qiu Z, Yao T, et al. Fully convolutional adaptation wks f semantic segmentation[C]Proceedings of the IEEE Conference on Computer Vision Pattern Recognition. IEEE, 2018: 68106818.
[7] Danielczuk M, Matl M, Gupta S, et al. Segmenting unknown 3d objects from real depth images using mask rcnn trained on synthetic data[C]2019 International Conference on Robotics Automation (ICRA). IEEE, 2019: 72837290.
[9] J Leng, Y Liu, D Du. Robust obstacle detection and recognition for driver assistance systems. IEEE Transactions on Intelligent Transportation Systems, 21, 1560-1571(2019).
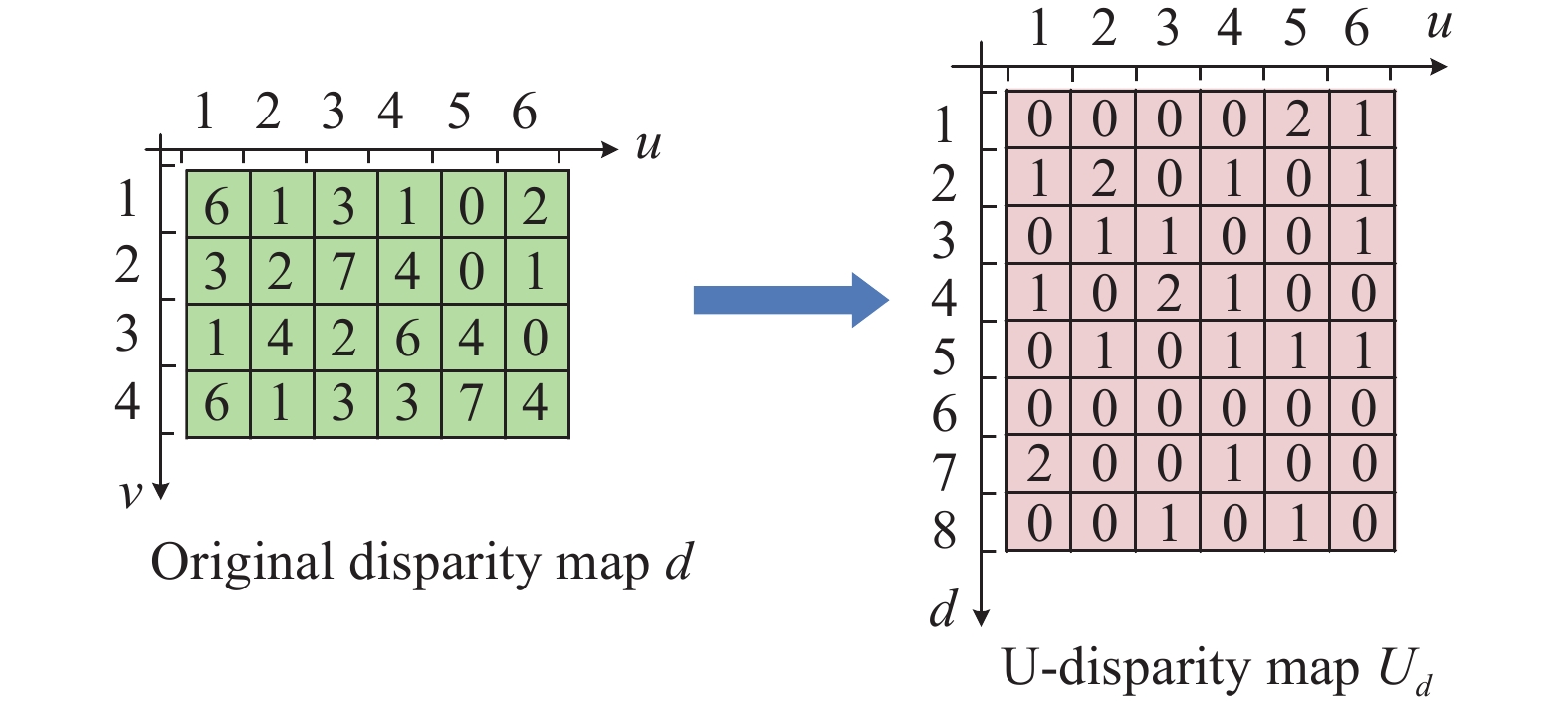
[10] Hu Z, Uchimura K. UVdisparity: an efficient algithm f stereovision based scene analysis[C]IEEE Proceedings. Intelligent Vehicles Symposium. IEEE, 2005: 4854.
[11] Li Xiaohan. Research on realtime detection technology of passable area based on binocular stereovision[D]. Beijing: University of Chinese Academy of Sciences, 2018.