
Yan Liang, Qingdong Zhang, Ning Zhao, Chuanmiao Li. Indoor location method based on UWB and inertial navigation fusion[J]. Infrared and Laser Engineering, 2021, 50(9): 20200484
- Infrared and Laser Engineering
- Vol. 50, Issue 9, 20200484 (2021)
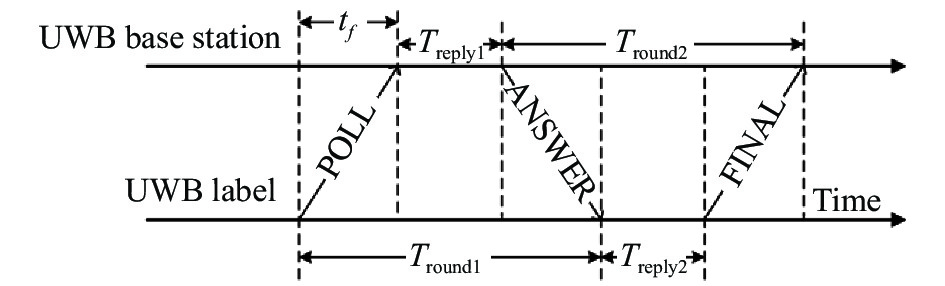
Fig. 1. UWB ranging flow chart
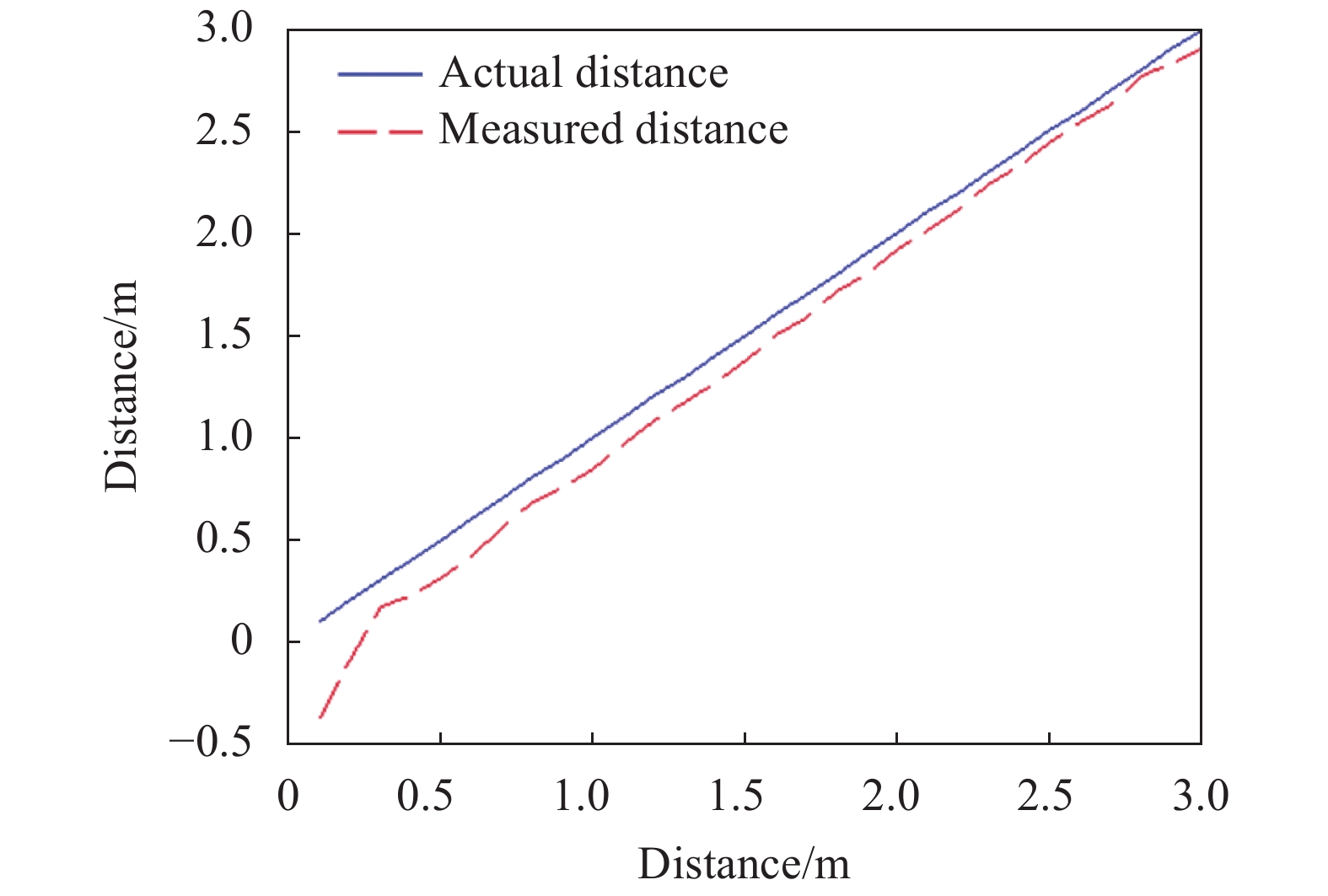
Fig. 2. Comparison diagram between actual distances and measured distances
Fig. 3. UWB ranging fitting curve
Fig. 4. Comparison diagram of actual error and error after fitting
Fig. 5. UWB ranging sample data
Fig. 6. Flow chart of the outlier detection method based on the modified Mahalanobis distance
Fig. 7. Ranging samples based on the modified Mahalanobis distance outliers detection method
Fig. 8. Carrier coordinate system
Fig. 9. Navigation coordinate system
Fig. 10. Functional block diagram of tight-coupling fusion based on pseudorange
Fig. 11. UWB base station layout and establishment of the navigation coordinate system
Fig. 12. Positioning label and trolley
Fig. 13. Rectangular trajectory
Fig. 14. Comparison diagram of UWB positioning results and actual trajectory
Fig. 15. Comparison diagram of positioning trajectories of the two positioning methods
Fig. 16. Comparison diagram of positioning errors of the two positioning methods
Fig. 17. CDF comparison diagram of positioning errors of the two positioning methods
|
Table 1. Residual modulus of UWB ranging fitting curve
|
Table 2. UWB base station coordinates

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20