
Yan Liang, Qingdong Zhang, Ning Zhao, Chuanmiao Li. Indoor location method based on UWB and inertial navigation fusion[J]. Infrared and Laser Engineering, 2021, 50(9): 20200484
- Infrared and Laser Engineering
- Vol. 50, Issue 9, 20200484 (2021)
Abstract
0 Introduction
The Information Era has come with the development of intelligent Internet technology, for example, the 5G era for mobile communication. Position, as a kind of information, is increasingly drawing public attentions. This is especially the case as more intelligent factories and workshops come along, the demands for indoor intelligent distribution are being further intensified, and so are the demands for positioning precision. The research and development of accurate and reliable indoor positioning methods not only can significantly improve the convenience and precision of indoor target positioning, but also enable a broad range of market applications and profound theoretical significance.
Marcin Uradzinski[
Presently, most fusion positioning methods are based on loose coupling. Yang Zhou[
In the references mentioned above, the fusion positioning methods are mostly based on a separate design of the UWB and inertial components. The application scenarios are rather limited and therefore such methods are of little practical values. Accordingly, this paper designs and implements a tight-coupling fusion positioning method based on UWB and inertial navigation. In the development of a fusion positioning system with high stability and robustness, the advantages of UWB ranging (free of cumulative error, resistance to interferences and high precision[
1 UWB calibration
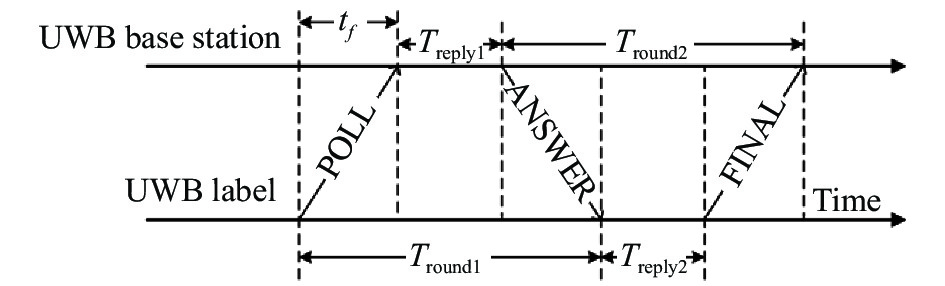
The communication mode of UWB ranging in this paper is shown in Fig. 1.
![]()
Figure 1.UWB ranging flow chart
The UWB label first broadcasts a UWB signal POLL and records the sending time
Due to variations in attitudes, indoor magnetic fields and environmental layout will all impact the ranging results in different ways when UWB is applied in various environments. To ensure the precision of ranging, it is necessary to calibrate UWB according to the positioning environment.
In the experimental environment, the UWB label is placed with a spacing of 0.1 m, and 30 sets of data are measured in a range of 0.1 m to 3.0 m from the UWB base station. To ensure the precision of the calibration, 1 000 ranging data points are obtained at each distance. The mean values of ranging data collected at each distance are plotted against the actual distances, as shown in Fig. 2.
![]()
Figure 2.Comparison diagram between actual distances and measured distances
As shown in Fig. 2, with the increase of the ranging distance, the ranging error shows a decreasing trend, with the maximum ranging error at 0.1 m of 0.47 m.
Take the mean value of ranging data of each distance as the abscissa data and the actual distance as the ordinate data for curve fitting. Tab. 1 shows the root mean square error corresponding to each fitting curve.
As shown in Tab. 1, compared with the quadratic fitting curve and cubic fitting curve, the root mean square error of the quartic fitting curve remains relatively small, and that of the quintic fitting curve is the smallest. Even though the root mean square error of the quantic fitting curve is smaller than that of the quartic fitting curve, the improvement is quite small. Considering the ranging precision and real-time performance, this paper adopts the quartic fitting polynomial as the fitting function of the UWB ranging calibration. The specific fitting function is shown in Equation (2).
| Fitting curve | Quadratic fitting | Cubic fitting | Quartic fitting | Quintic fitting |
| Residual | 0.04083 m | 0.03166 m | 0.01924 m | 0.01897 m |
Table 1. Residual modulus of UWB ranging fitting curve
Figure 3 shows the quartic fitting curve.
![]()
Figure 3.UWB ranging fitting curve
Figure 4 shows the comparison between actual errors and errors after fitting.
![]()
Figure 4.Comparison diagram of actual error and error after fitting
As shown in the figure above, the average ranging error in the 30 ranging data groups before calibration is 0.120 m, while that after calibration fitting is merely 0.012 m. The ranging error of UWB is effectively suppressed by ranging calibration.
2 Outlier detection method based on modified Mahalanobis distance
According to the ranging data obtained in the calibration process, the overall precision of the ranging is about 0.1 m. However, there are outliers with significant errors in the set of ranging values. Figure 5 (a) and (b) show the data samples of 1 m and 2.5 m ranging in the calibration process, respectively.
![]()
Figure 5.UWB ranging sample data
In the case of a small number of ranging samples, outliers greatly impact the ranging errors, which subsequently affects the trajectory tracking precision of the positioning target. Therefore, this paper adopts an outlier detection method based on Mahalanobis distance to eliminate the outliers in the UWB ranging process.
The conventional Mahalanobis distance outlier detection method directly applies sample data mean and covariance matrix for calculating the Mahalanobis distance. In the case of a small sample size or a large number of outliers, this method deviates the calculated mean and covariance matrix towards the outliers, resulting in outliers being detected as normal values, futher resulting in incomplete exclusion of outliers. This paper proposes an improvement based on the conventional Mahalanobis distance outlier detection method. In this paper, all mean values and covariance matrixes applied in the detection process are stable values calculated in the Minimum Covariance Determinant (MCD) estimates, so that there is a significant difference between the Mahalanobis distance of the outliers and the normal values in the calculated sample, thereby making it possible to exclude the outliers.
The conventional Mahalanobis distance is calculated with the following equation.
Where, d is the Mahalanobis distance,
The core idea of the modified Mahalanobis distance outlier detection method is to apply FAST MCD algorithm (FAST-MCD) proposed by Rousseeuw[
First, randomly select a number of
The flow chart of the outlier detection method based on the modified Mahalanobis distance is shown in Fig. 6.
![]()
Figure 6.Flow chart of the outlier detection method based on the modified Mahalanobis distance
Figure 7(a) and (b) show the ranging results at 1 m and 2.5 m upon the exclusion of the outliers by the outlier detection method based on the modified Mahalanobis distance.
![]()
Figure 7.Ranging samples based on the modified Mahalanobis distance outliers detection method
As shown in the above two figures, there are no outliers with relatively large deviations in the whole ranging process, and the ranging values demonstrate quite small fluctuations with strong robustness. The above mentioned ranging experiment has demonstrated the effectiveness of the outlier detection method based on the modified Mahalanobis distance adopted in this paper, and that this method is able to ensure real-time ranging while effectively avoiding the occurrence of outliers in the ranging process.
3 Positioning method based on UWB and inertial navigation fusion
The inertial navigation technology is a fully independent navigation and positioning method. As it has no photoelectric connection with the external environment, it features strong anti-interference capability, high real-time navigation data update rate and excellent stability. However, the errors in the positioning process accumulate over time, which is mainly due to inherent precision of the accelerometer sensor and the gyroscope sensor, thereby making it difficult to position for a prolonged period of time. In current applications, the most effective method to solve this problem is fusion positioning and the use of different sensors to complement each other so as to improve navigational positioning precision[
Compared with common indoor wireless positioning technologies such as WiFi, Bluetooth and ZigBee, UWB signals are advantageous in that they have excellent anti-interference ability, high resolution, centimeter-level ranging accuracy, etc., making UWB signal standing out in the field of wireless positioning[
In view of the above considerations, this paper designs a UWB and inertial navigation fusion positioning method based on the extended Kalman filter technology, and leverage the strengths and characteristics of both types of sensors, so that they are integrated to complement each other. Therefore, inertial navigation posture is applied to minimize errors caused by the environmental interference in UWB, in addition, the advantage of high precision ranging of UWB is taken to suppress the cumulative error in the inertial navigation solution process.
The fusion positioning method consists of loose coupling and tight coupling depending on the degree of fusion, of which loose coupling is relatively simple. The two systems involved in fusion positioning are independent of each other in the positioning process. Simple fusion is performed on the two sets of positioning results obtained[
3.1 Establishment of the coordinate system
Generally IMU is fixed to the carrier, so the output data of the sensor is measured in the carrier coordinate system. Therefore, a transformation matrix must be applied to convert the IMU output data into the format in the navigation coordinate system to facilitate calculation. The following section introduces each and every coordinate system adopted in this paper.
(1) Carrier coordinate system
The inertial navigation itself defines an inertial reference coordinate system. However, for the convenience of calculation, when the inertial navigation and the carrier are fixed together, the coordinate system defined by the inertial navigation itself is generally superimposed with the carrier coordinate system. Therefore, when the two coordinate systems are superimposed, the center of mass of the carrier can be taken as the origin of the carrier coordinate system. The X-axis is in the longitudinal direction, that is, the forward direction of the carrier motion. The Z-axis is in the direction perpendicular to the plane of the carrier, and the Y-axis is in a right-handed coordinate system, perpendicular to the XZ plane and pointing to the right. The inertial navigation accelerometer and gyroscope then output the linear acceleration and angular velocity of the carrier moving along the three axes of the carrier coordinate system. The carrier coordinate system in use, also known as the b system, is denoted by
![]()
Figure 8.Carrier coordinate system
(2) Navigation coordinate system
The navigation coordinate system, also known as the n system, is a global coordinate system for constructing the whole positioning system denoted by coordinates
![]()
Figure 9.Navigation coordinate system
The ground plane in the indoor environment is the XY plane. The Z-axis is a right-handed coordinate system, perpendicular to the XY plane and pointing upwards. The base stations are placed along various coordinate axes, and the origin is where base station 0 is located.
3.2 State equation
In this paper, EKF is applied to for the tight-coupling fusion positioning of the inertial navigation system and UWB. The functional block diagram of the tight-coupling fusion positioning of the UWB ranging and inertial navigation system is shown in Fig.10.
![]()
Figure 10.Functional block diagram of tight-coupling fusion based on pseudorange
Pseudorange
Given the dynamic characteristics of the positioning target, the system state vectors taken are the 12 dimensions including position, velocity, direction and angular velocity. Before using EKF to estimate the state quantity of the system, estimations of the system state are divided into two parts: estimation of angular velocity and estimation of other system state quantities. Among them, the output of the gyroscope is directly applied as the estimation for the angular velocity, i.e.:
The gyroscope errors consist of scale errors and dynamic errors. Assuming that the gyroscope applied by the system has been well calibrated, all such errors can be ignored, and therefore the output of the gyroscope can be modeled as:
In the equation above,
Similar to the modeling process of the gyroscope, the accelerometer is modeled as:
In the equation above,
Therefore, it only requires to make use of EKF to estimate other system states, namely, estimating a total of state quantities in 9 dimensions, including position, velocity and direction. As the computational complexity of Kalman filter is approximately
Therefore, in the process of EKF calculation, the state vector
In the equation above, X denotes the position coordinates of the positioning target in the navigation coordinate system,
The orientation of the target here is represented by reference attitude and rotation vector
Expand the first order of
Where, I is the identity matrix of size 3 × 3.
The attitude estimation of the positioning target
In the equation above, the reference attitude
Assuming that the position change of the internal positioning target relative to the carrier coordinate system during
R is expressed as the following:
The position of the target in the navigation coordinate system at time (k+1) is then:
The velocity of the positioning target in the carrier coordinate system at time (k+1) can be obtained from the following equation.
The update of
In the above equation, d denotes the attitude error represented by the Rodriguez parameter, as follows:
The state model of the system is expressed as follows:
f in the equation above represents the linearized function model after first order Taylor expansion of the system.
3.3 Observation equation
In UWB and inertial navigation fusion positioning, since the UWB ranging has no cumulative errors and the ranging error is merely around 0.1 m, it falls into the wireless ranging technology with relatively high precision. Therefore, UWB ranging values are used as the observed values of extended Kalman filtering.
One assumption is that the coordinates at known position
Where,
And the observation matrix is:
Where,
In the above equation,
Assuming that the position coordinate obtained by the solution of the positioning target is
Based on the state equation and observation equation, the target state information can be obtained by the time update and state update of the EKF.
The time update equation is:
State update equation is:
4 Experiment and result analysis
4.1 Introduction to experimental environment and hardware
The experimental test environment in this paper is a laboratory with a size of 5.0 m×8.0 m. Positioning cameras with the Optitrack high-precision positioning motion capturing system are set around a 4.0 m×4.2 m rectangle in the room. The experiment site in this paper is located in a 2.4 m×2.4 m rectangle within the motion capturing system. The motion capturing system is a high-precision indoor positioning system adopting infrared cameras to cover indoor positioning space. Reflective markers are placed on the objects to be positioned. The three-dimensional position information of these objects is calculated by capturing the reflection images of the reflective markers on the positioning cameras. In addition, the precision of the Optitrack positioning cameras is as high as 0.1 mm. In all experiments in this paper, trajectories calculated based on the motion capturing system are taken as actual target trajectories, the positioning precisions of which are compared with the proposed positioning method in this paper.
In the experimental scene of this paper, six UWB base stations are set up and labelled with ID 0 to 5, respectively. The main control chip applied by the UWB base station is STM32F103RC.
The layout of the UWB base stations in the experimental environment and the navigation coordinate system used in this paper are shown in Fig. 11.
![]()
Figure 11.UWB base station layout and establishment of the navigation coordinate system
In measuring the coordinates of the base stations, the reflective markers identifiable by the motion capturing system are first placed on the base stations, and then the positioning coordinates captured by the motion capturing system are taken as specific position coordinates of each base station, as shown in Tab. 2.
| Base station ID | X/m | Y/m | Z/m |
| 0 | 0.02 | 0.01 | 0.14 |
| 1 | 2.41 | 0.01 | 1.48 |
| 2 | 2.40 | 1.21 | 0.15 |
| 3 | 2.42 | 2.40 | 0.15 |
| 4 | 0.00 | 2.41 | 1.49 |
| 5 | 0.01 | 1.22 | 0.14 |
Table 2. UWB base station coordinates
4.2 Fusion positioning experiments
To verify the precision of the UWB and inertial navigation fusion positioning method proposed in this paper, field experiments are carried out, the estimated trajectory errors, the positioning accuracy and trajectory error of the two positioning methods are calculated.
As shown in Fig.12, in this experiment, the positioning label is fixed to a positioning trolley. The trolley is controlled by the motion capturing system based on the feedback of the input trajectory coordinates. In the experiment, the trolley moves at a speed of 0.05 m/s, and the motion precision of the trolley is up to centimeter level at this speed. The positioning label affixed to the trolley is supplied by a power bank via a USB port. A reflective marker point identifiable by the motion capturing system is laid on the center of the positioning label.
![]()
Figure 12.Positioning label and trolley
The controlled trolley moves in a rectangular track of 1.2 m×1.2 m at the experiment site. The schematic diagram of the simulated trolley trajectory is shown in Fig.13. The trolley began its trajectory at point A and moved 1.2 m to point B, after which it further moves 1.2 m to point C and 1.2 m to point D until it eventually returns to point A. In the experiment results, the trajectory of the reflective marker in the center of the positioning label obtained by the motion capturing system is taken as the actual motion trajectory of the positioning label.
![]()
Figure 13.Rectangular trajectory
First, the ranging data obtained in the movement of the trolley is input into MATLAB and the UWB positioning trajectory was generated. The results are shown in Fig.14(a) and (b).
![]()
Figure 14.Comparison diagram of UWB positioning results and actual trajectory
In Fig.14(a) and (b), the line formed by red dots represents the actual motion trajectory, and the solid blue line represents the position trajectory only with UWB for positioning. An artificial disturbance is added during the trolley motion by human movement, creating obstruction between the UWB base stations and the label. According to the experiment data, better motion trajectories of the positioning target are obtained by applying UWB without obstruction. In segments A B, B C and D A before introducing obstruction, the maximum positioning error and the mean absolute error are 0.461 m and 0.378 m, respectively, which has achieved positioning at centimeter level. However, in segment C D with human interference introduced, the maximum positioning error is 1.153 m, and the mean absolute error is 0.412 m. Throughout the rectangular trajectory experiment, the maximum absolute error is 1.153 m, the mean absolute error is 0.386 m, and the root mean square error is 0.397 m. Based on the above data, that obstructions of the UWB signal have no great impact on the precision of the final positioning. In this case, the positioning results by applying UWB and inertial navigation fusion are given below in Fig.15(a) and (b).
![]()
Figure 15.Comparison diagram of positioning trajectories of the two positioning methods
In Fig.15(a) and (b), the line formed by red dots represents the actual motion trajectory, the solid blue line is the motion trajectory obtained with UWB alone for the positioning experiment, and the black double dashed line is the motion trajectory with the UWB and inertial navigation fusion method. It can be seen from the figure that, compared to the positioning only with UWB, the positioning using the fusion of UWB and inertial navigation can achieve a higher positioning accuracy without changing the real-time performance.
Figure 16 and Fig.17 show error comparison of the two positioning methods.
![]()
Figure 16.Comparison diagram of positioning errors of the two positioning methods
![]()
Figure 17.CDF comparison diagram of positioning errors of the two positioning methods
As can be seen from Fig.16, even though a surge of errors in positioning with UWB and inertial navigation fusion is observed in case of interference, the errors are significantly reduced compared with the positioning results only with UWB. Robustness of positioning is significantly improved.In the positioning with UWB and inertial navigation fusion, in segments A B, B C and D A before introducing the obstruction, the maximum positioning error is 0.305 m, and the mean absolute error is 0.232 m, which has enabled positioning at centimeter level. However, in segment C D with human interference introduced, the maximum positioning error is 0.692 m, and the mean absolute error is 0.285 m. Throughout the rectangular trajectory, the mean absolute error is 0.246 m and the root mean square error is 0.255 m, demonstrating that such positioning method has reached a high positioning precision. Compared with the positioning results with UWB alone, the mean precision is improved by 36.3% and the root mean square error is reduced by 35.8%.
According to Fig.17, when UWB alone is used for positioning, the error is within 1.0 m, and around 90% of the points have an error of 0.4 m, while the error of the UWB and inertial navigation fusion positioning is within 0.6 m, and over 90% of the points have an error of less than 0.25 m.
5 Conclusion
To achieve the goal of obtaining high-precision positioning information of positioning labels in complex indoor environments, this paper studies the fusion positioning method by applying UWB and inertial navigation. First, calibrate the UWB ranging in the experimental environment. Then, detect and eliminate outliers with an outlier detection algorithm based on modified Mahalanobis distance. And finally, based on the extended Kalman filter algorithm, design and program an indoor fusion positioning method with UWB technology and inertial navigation system. Perform experimental validation and analyze the experiment in the experimental environment. The final experimental results show that the method proposed in this paper has higher accuracy and better robustness compared with those of the traditional single-sensor positioning method.
Nevertheless, this study only introduces the single external interference, which would generally develop into a variety of interferences in actual application scenarios. Therefore, the current algorithms are subject to optimization in future works, with detailed work as follows.
(1) Extend the positioning environment, consider a method that can dynamically select UWB base stations in the environment, and further improve the accuracy of UWB ranging.
(2) Consider the introduction of more complex interference models, and focus on the research on more fusion related methods, such as applications of particle filtering and factor graph in fusion positioning algorithms.
(3) Introduce more sensors to the positioning system, and design a fusion positioning system with both UWB and multi-sensor.
References
[1] M Uradzinski, H Guo, X Liu, et al. Advanced indoor positioning using Zigbee wireless technology. Wireless Personal Communications, 97, 6509-6518(2017).
[2] A Oulose, O S Eyobu, D S Han. An indoor position estimation algorithm using smartphone IMU sensor data. IEEE Access, 7, 11165-11177(2019).
[3] Y L Wang, J N Lv, J H Li, et al. High precision indoor positioning system based on UWB. Yangtze River Information Communication l, 34, 111-114, 117(2021).
[4] Chen D L, Yang Z. Study on high precision indo positioning technology based on UWBMEMS[D]. Xuzhou: China University of Mining Technology, 2015.(in Chinese)
[5] B W Sun, Q G Fan, Y H Wu, et al. Foot-mounted pedestrian navigation technology based on tightly coupled PDR/UWB. Transducer and Microsystem Technologies, 36, 43-48(2017).
[6] Zampella F, Angelis A D, Skog I, et al. A constraint approach f UWB PDR fusion[C]Proceedings of the 2012 International Conference on Indo Positioning Indo Navigation (IPIN), IEEE, 2012: 26.
[7] L L Chen, Y Yang, E Yuan, Y X Zhao, et al. Integrated indoor positioning algorithm based on UWB/PDR. Information Technology and Network Security, 38, 53-57(2019).
[8] Alhadrami S, Salman A, Khalifa H A. Ultra wideb positioning: an analytical study of emerging technologies[C]Proceeding of International Conference Sens Technologies Applications (SENSCOMM). IEEE, 2014: 19.
[9] P Q Yin, D M Lu, Y Yuan, et al. An improved non-local image de-noising algorithm based on Mahalanobis distance. Journal of Computer-Aided Design & Computer Graphics, 28, 404-410(2016).
[10] Hailiang Xiong, Ruochen Bian, Yujun Li, et al. Fault-Tolerant GNSS/SINS/DVL/CNS integrated navigation and positioning mechanism based on adaptive in-formation sharing factors. IEEE Systems Journal, 14, 3744-3754(2020).
[11] Kai Wen, Kegen Yu, Yingbing Li. A new quaternion Kalman filter based foot-mounted IMU and UWB tightly-coupled method for indoor pedestrian navigation. IEEE Transactions on Vehicular Technology, 69, 4340-4352(2020).
[12] Q L Tian, K I K Wang, Z Salcic. A resetting approach for INS and UWB sensor fusion using Particle Filter for pedestrian tracking. IEEE Transactions on Instrumentation and Measurement, 69, 5914-5921(2020).
[13] her C, Zwirello L, Zwick T, et al. Integrity moniting f UWBINS tightly coupled pedestrian indo scenarios [C]Indo Positioning Indo Navigation (IPIN), 2011 International Conference on. IEEE, 2011, PP(16): 6071948.
[14] Hailiang Xiong, Zhenzhen Mai, Juan Tang, et al. Robust GPS/INS/DVL navigation and positioning method using adaptive federated strong tracking filter based on weighted least square principle. IEEE Access, 7, 26168-26178(2019).
[15] BarShalom Y, Li X R, Kirubarajan T. Estimation with Applications to Tracking Navigation: They Algithms Software[M]. Canada: John Wiley & Sons, 2001: 303306.
[16] Zipfel P H. Modeling Simulation of Aerospace Vehicle Dynamics[M]. 2nd ed. USA: American Institute of Aeronautics Astronautics, 2007: 98101.
[17] F L Markley. Attitude error representations for Kalman filtering. Journal of Guidance, Control, and Dynamics, 26, 311-317(2003).


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20