
Dingyu Xu, Wenhao Xu, Qiang Yang, Wenshuai Zhang, Shuangchun Wen, Hailu Luo. All-optical object identification and three-dimensional reconstruction based on optical computing metasurface[J]. Opto-Electronic Advances, 2023, 6(12): 230120
- Opto-Electronic Advances
- Vol. 6, Issue 12, 230120 (2023)
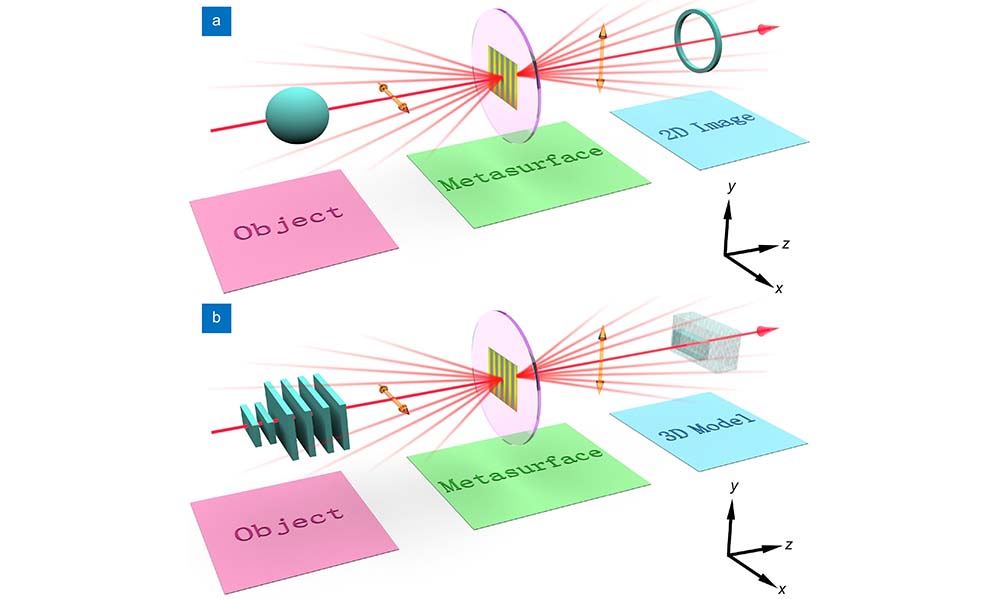
Fig. 1. Scheme illustration of object identification and all-optical 3D reconstruction system. (a ) A contour surface image of the object can be obtained in a single processing of the system. (b ) High-contrast objects and low-contrast objects can be reconstructed by this all-optical computing metasurface system.
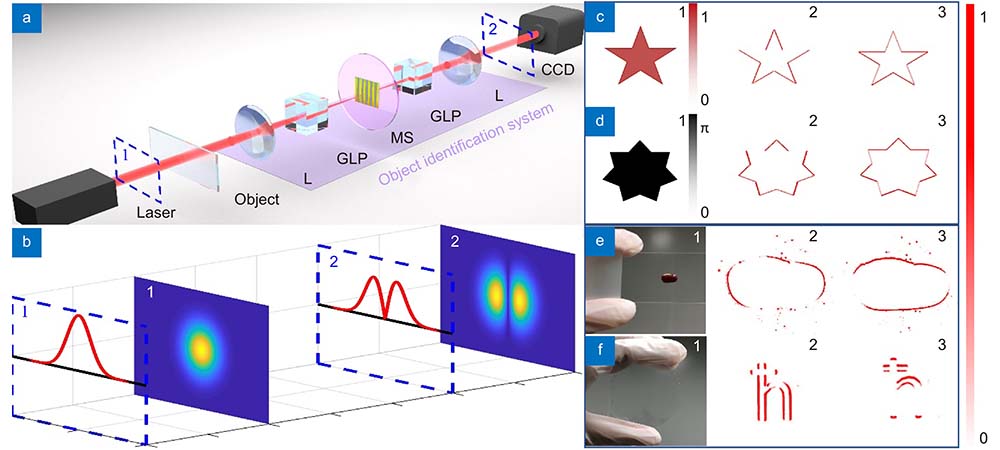
Fig. 2. Experimental demonstration of object identification ability. (a ) Schematic diagram of the experimental optical path for object identification. L: lens; GLP: Glan laser polarizer; MS: the optical computing metasurface; CCD: charge-coupled device. Two lenses with focal lengths of 175 mm form a 4f system. He-Ne laser beam with wavelength λ = 632.8 nm is chosen as the experimental laser source. (b ) The theory intensity distribution in planes 1 and 2, respectively. (c –d ) Theoretical object identification results of high- and low-contrast objects. respectively. The first, second, and third rows represent the theoretical original, x-direction contours, and y-direction contours of those two types of objects, respectively. (e –f ) Part of experimental identification results of high- and low-contrast objects, respectively. The first, second, and third rows represent the experimental the ordinary images, as well as the contour surfaces along the x axis and y axis of two types of objects, respectively.
Fig. 3. Experimental demonstrations of an all-optical 3D high-contrast object reconstruction system. (a ) Schematic diagram of the all-optical high-contrast object 3D reconstruction. Different color planes represent different projection planes. (b ) Contour information results of an observed object on different projection planes in (a). (c ) The 3D model reconstructed by recombining the different projection results captured in (b). (d1 –d3 ) The origin image, the 3D experimental reconstruction models of rotation interval angle are 16° and 4° of coriander seed, respectively. (e1 –f3 ) 3D experimental reconstruction models of the mushroom model and lollipop model with the same type as (d1–d3).
Fig. 4. Experimental scheme of 3D reconstruction about the high-contrast object with complex surface. (a ) The 3D reconstruction scheme relies on discretizing the target object into 2D slices with small gaps between them. (b ) Contour information contained in every slice of an observed object would be captured. (c ) The 3D model is reconstructed by recombining the different projection results captured in (b). (d –f ) Original and 3D experimental reconstruction models of grooves, lands, and bosses, respectively. Scale bar, 200 μm.
Fig. 5. Experimental results of all-optical 3D low-contrast object reconstruction system. (a1 −a3 ) The images of the nonuniform contour images obtained by rotating the angle β, 0°, and −β of the second GLP, along the y direction, respectively. (a4 ) The phase gradient result is supplied by subtracting (a1) and (a3) along the y direction. (b1 −b4 ) The intensity distributions of images (a1–a4) at black dashed line. The horizontal and vertical coordinates represent pixels and intensity, respectively. (c1 −d4 ) The same results of (a1−b4) along the e ) The 3D experimental reconstruction model of the low-contrast object. (f ) The SEM image of the partial sample surface. Scale bar, 50 μm. (g ) The SEM image of the etching depth about the low-contrast object.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20