
Dingyu Xu, Wenhao Xu, Qiang Yang, Wenshuai Zhang, Shuangchun Wen, Hailu Luo. All-optical object identification and three-dimensional reconstruction based on optical computing metasurface[J]. Opto-Electronic Advances, 2023, 6(12): 230120
- Opto-Electronic Advances
- Vol. 6, Issue 12, 230120 (2023)
Abstract
Introduction
As object identification and three-dimensional (3D) reconstruction techniques become essential in various reverse engineering, artificial intelligence, medical diagnosis, and industrial production fields, there is an increasing focus on seeking vastly efficient, faster speed, and more integrated methods that can simplify processing
As two-dimensional nanostructures engineered at the subwavelength scales, metasurfaces have exhibited remarkable capabilities in the revolutionary developments in optics
In this paper, we show that parts of the applications in the field of optical computing metasurface can be used in object identification and 3D reconstruction techniques for the purpose of establishing a faster, more convenient, and miniaturized processing system. In previous optical computing metasurface research, mainly achieved image edge detection
Theory
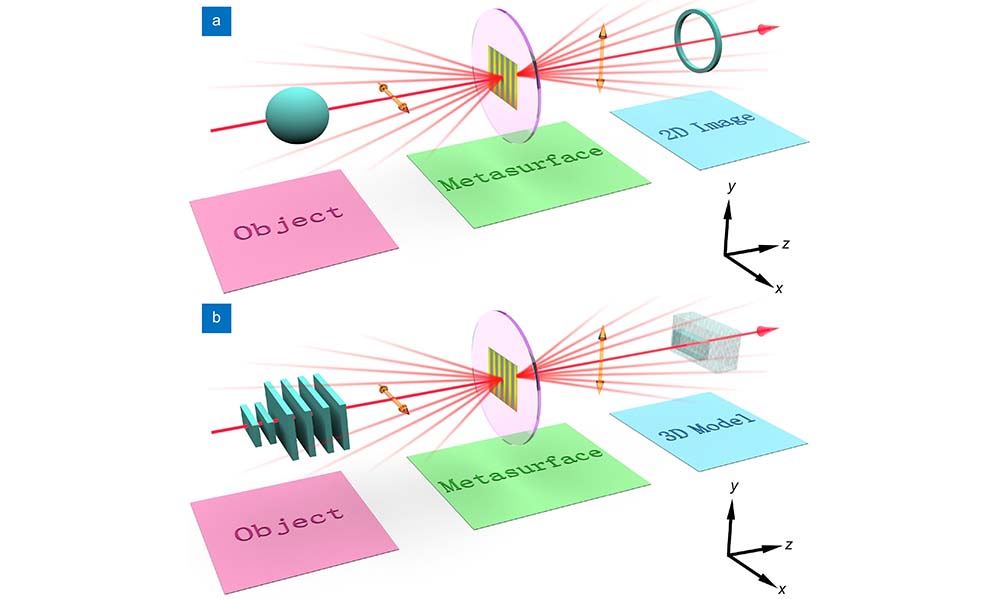
The principle of the object identification system is schematically illustrated in
![]()
Figure 1.
To begin with, we study the theoretical generation of this all-optical system. The experimental scheme of the object identification capability is displayed in
![]()
Figure 2.
where
where
where
Since the dimensions of objects are much more than the displacements
According to
Except for high-contrast objects analyzed above, there are also low-contrast objects that are tough to recognize and reconstruct in real-life scenarios. These low-contrast objects are often difficult to observe directly due to their minuscule changes in intensity, making them almost invisible in bright fields. Thus, there is an urgent need to realize a fast and accurate technology to identify low-contrast objects. The expression of the low-contrast object can be considered as
This operation calculates the phase gradient of incident low-contrast objects, which can be employed for object identification. Since the complex characteristics of low-contrast objects and rotating them cannot attain the same 3D reconstruction model as high-contrast objects, we note that different phase delays generated by them would help us to reconstruct their 3D model. For this reason, we need to rely on the relationship between phase delays and thickness, this connection between the thickness and phase delays of the low-contrast object has been determined as the following
where
Subsequently, subtracting the results of the positive and negative rotation angles
Results and discussion
Experiment
To experimentally achieve object identification, the whole identification system is the purple part in
Although the optical computing metasurface used in this system only can detect one-dimensional contours, the contour surface in another dimension can be able to extracted by rotating the optical computing metasurface along the direction perpendicular to the propagation direction of the light path. As the first example of object identification, we consider the high- and low-contrast objects theoretically in
As mentioned above, a 3D model of a high-contrast object can be reconstructed by continuously superimposing the two-dimensional contours. Therefore, to confirm the feasibility of the 3D reconstruction in the above scheme, take a sphere in
![]()
Figure 3.
Without loss of generality, we also focus on high-contrast objects with complex contour surfaces. For some high-contrast objects with complex surfaces, the 3D reconstruction method by rotating objects is no longer applicable. Therefore, we propose another 3D reconstruction method by slicing objects. The process is also implementable with our platform because its 3D experimental reconstruction model can be reconstructed by superimposing those results of slices in different planes. Taking a sphere in
![]()
Figure 4.
To demonstrate the performance of this technique in the 3D reconstruction field, for the second example, we considered 3D reconstruction of low-contrast objects. Owing to the unique characteristics of low-contrast objects, such as their lack of distinct boundaries and subtle variations in color and texture, the process of 3D reconstructing them is considerably intricate and challenging in comparison to high-contrast objects. In contrast to high-contrast objects that can be easily captured using the aforementioned technique of object rotation, an alternative method is required for determining thickness in the 3D reconstruction of low-contrast objects. In this regard, we propose a phase-related technology for reconstructing such objects and have successfully demonstrated its efficacy through experimentation. To realize this technology, we need to place the low-contrast object at the front focal length of the first lens in
![]()
Figure 5.
Fabrication of optical computing metasurface and low-contrast objects
The manufacture of the optical computing metasurface is fabricated by writing strip-like nanostructure at 200 μm below the surface of a silica glass sample by focusing the femtosecond pulse laser beam. After being irradiated by the femtosecond pulse laser beam, the uniform silica glass sample (
Conclusions
In conclusion, we have established a mechanism for all-optical object identification based on the optical computing metasurface as well as a 3D reconstruction technique. Utilization of this scheme, we experimentally demonstrated that the system could not only identify diverse sample information but also pick up defective products in the same type of objects, whether in high-contrast objects or low-contrast objects. This operation significantly improves the identification speed and reduces the memory consumption in the process. Our findings hold great promise for future applications in fields such as medical imaging and industrial inspection. Furthermore, we exploit this feature to reconstruct the model of the high-contrast samples with a complex outline by rotating samples, and to reconstruct low-contrast sample models that are difficult to observe by breaking orthogonal bias. Whether in biomedicine or manufacturing, a complete 3D reconstruction simulated model can quickly realize the simulation analysis of the samples. We anticipate that the exploitation of this proposed all-optical processing technology can bring novel opportunities for more efficient, convenient, and reliable object recognition as well as 3D model reconstruction. We believe that this work will pave the way for breakthroughs in imaging processing and industrial inspection areas and drive innovation across a wide range of 3D reconstruction industries.
References
[1] S Rusinkiewicz, O Hall-Holt, M Levoy. Real-time 3D model acquisition. ACM Trans Graphics, 438-446(2002).
[3] S Zhang. High-speed 3D shape measurement with structured light methods: a review. Opt Lasers Eng, 119-131(2018).
[4] G Kim, Y Kim, J Yun, SW Moon, S Kim et al. Metasurface-driven full-space structured light for three-dimensional imaging. Nat Commun, 5920(2022).
[5] JW Liu, Q Yang, SZ Chen, ZC Xiao, SC Wen et al. Intrinsic optical spatial differentiation enabled quantum dark-field microscopy. Phys Rev Lett, 193601(2022).
[6] WT Buono, A Forbes. Nonlinear optics with structured light. Opto-Electron Adv, 210174(2022).
[7] R Gordon, GT Herman. Three-dimensional reconstruction from projections: a review of algorithms. Int Rev Cytol, 111-151(1974).
[8] O Russakovsky, J Deng, H Su, J Krause, S Satheesh et al. ImageNet large scale visual recognition challenge. Int J Comput Vis, 211-252(2015).
[9] H Kwon, D Sounas, A Cordaro, A Polman, A Alù. Nonlocal metasurfaces for optical signal processing. Phys Rev Lett, 173004(2018).
[10] JX Zhou, HL Qian, CF Chen, JX Zhao, GR Li et al. Optical edge detection based on high-efficiency dielectric metasurface. Proc Natl Acad Sci U S A, 11137-11140(2019).
[11] HJ Caulfield, S Dolev. Why future supercomputing requires optics. Nat Photonics, 261-263(2010).
[12] A Silva, F Monticone, G Castaldi, V Galdi, A Alù et al. Performing mathematical operations with metamaterials. Science, 160-163(2014).
[13] WL Liu, M Li, RS Guzzon, EJ Norberg, JS Parker et al. A fully reconfigurable photonic integrated signal processor. Nat Photonics, 190-195(2016).
[14] Y Zhou, HY Zheng, II Kravchenko, J Valentine. Flat optics for image differentiation. Nat Photonics, 316-323(2020).
[15] T Badloe, S Lee, J Rho. Computation at the speed of light: metamaterials for all-optical calculations and neural networks. Adv Photonics, 064002(2022).
[16] X Zhang, LL Huang, RZ Zhao, HQ Zhou, X Li et al. Basis function approach for diffractive pattern generation with Dammann vortex metasurfaces. Sci Adv, eabp8073(2022).
[17] LM Wu, TJ Fan, SR Wei, YJ Xu, Y Zhang et al. All-optical logic devices based on black arsenic–phosphorus with strong nonlinear optical response and high stability. Opto-Electron Adv, 200046(2022).
[18] AV Kildishev, A Boltasseva, VM Shalaev. Planar photonics with metasurfaces. Science, 1232009(2013).
[19] DY Xu, SC Wen, HL Luo. Metasurface-based optical analog computing: from fundamentals to applications. Adv Devices Instrum, 0002(2022).
[20] YX Zhang, MB Pu, JJ Jin, XJ Lu, YH Guo et al. Crosstalk-free achromatic full Stokes imaging polarimetry metasurface enabled by polarization-dependent phase optimization. Opto-Electron Adv, 220058(2022).
[21] YY Shi, CW Wan, CJ Dai, S Wan, Y Liu et al. On-chip meta-optics for semi-transparent screen display in sync with AR projection. Optica, 670-676(2022).
[22] T Pertsch, SM Xiao, A Majumdar, GX Li. Optical metasurfaces: fundamentals and applications. Photonics Res, OMFA1-OMFA3(2023).
[23] JX Zhou, HL Qian, JX Zhao, M Tang, QY Wu et al. Two-dimensional optical spatial differentiation and high-contrast imaging. Natl Sci Rev, nwaa176(2021).
[24] YL Wang, QB Fan, T Xu. Design of high efficiency achromatic metalens with large operation bandwidth using bilayer architecture. Opto-Electron Adv, 200008(200008).
[25] A Pors, MG Nielsen, SI Bozhevolnyi. Analog computing using reflective plasmonic metasurfaces. Nano Lett, 791-797(2015).
[26] SJ Wang, WT Qin, S Zhang, YC Lou, CQ Liu et al. Nanoengineered spintronic-metasurface terahertz emitters enable beam steering and full polarization control. Nano Lett, 10111-10119(2022).
[27] YJ Huang, TX Xiao, S Chen, ZW Xie, J Zheng et al. All-optical controlled-NOT logic gate achieving directional asymmetric transmission based on metasurface doublet. Opto-Electron Adv, 220073(2023).
[28] TF Zhu, YH Zhou, YJ Lou, H Ye, M Qiu et al. Plasmonic computing of spatial differentiation. Nat Commun, 15391(2017).
[29] Y Zhou, WH Wu, R Chen, WJ Chen, RP Chen et al. Analog optical spatial differentiators based on dielectric metasurfaces. Adv Opt Mater, 1901523(2020).
[30] Q He, F Zhang, MB Pu, XL Ma, X Li et al. Monolithic metasurface spatial differentiator enabled by asymmetric photonic spin-orbit interactions. Nanophotonics, 741-748(2020).
[31] DY Xu, H Yang, WH Xu, WS Zhang, KM Zeng et al. Inverse design of Pancharatnam–Berry phase metasurfaces for all-optical image edge detection. Appl Phys Lett, 241101(2022).
[32] X Liang, Z Zhou, ZL Li, JX Li, C Peng et al. All-optical multiplexed meta-differentiator for tri-mode surface morphology observation. Adv Mater, 2301505(2023).
[33] ZL Deng, QA Tu, YJ Wang, ZQ Wang, T Shi et al. Vectorial compound metapixels for arbitrary nonorthogonal polarization steganography. Adv Mater, 2103472(2021).
[34] H Yang, K Ou, HY Wan, YQ Hu, ZY Wei et al. Metasurface-empowered optical cryptography. Mater Today, 424-445(2023).
[35] F Zhang, YH Guo, MB Pu, LW Chen, MF Xu et al. Meta-optics empowered vector visual cryptography for high security and rapid decryption. Nat Commun, 1946(2023).
[36] MB Pu, X Li, XL Ma, YQ Wang, ZY Zhao et al. Catenary optics for achromatic generation of perfect optical angular momentum. Sci Adv, e1500396(2015).
[37] XG Luo, MB Pu, X Li, XL Ma. Broadband spin Hall effect of light in single nanoapertures. Light Sci Appl, e16276(2017).
[38] Y Liu, MC Huang, QK Chen, DG Zhang. Single planar photonic chip with tailored angular transmission for multiple-order analog spatial differentiator. Nat Commun, 7944(2022).
[39] C Zeng, H Lu, D Mao, YQ Du, H Hua et al. Graphene-empowered dynamic metasurfaces and metadevices. Opto-Electron Adv, 200098(2022).
[40] XW Wang, H Wang, JL Wang, XS Liu, HJ Hao et al. Single-shot isotropic differential interference contrast microscopy. Nat Commun, 2063(2023).
[41] XM Zhang, Y Zhou, HY Zheng, AE Linares, FC Ugwu et al. Reconfigurable metasurface for image processing. Nano Lett, 8715-8722(2021).
[42] TT Xiao, H Yang, Q Yang, DY Xu, RS Wang et al. Realization of tunable edge-enhanced images based on computing metasurfaces. Opt Lett, 925-928(2022).
[43] WW Fu, D Zhao, ZQ Li, SD Liu, C Tian et al. Ultracompact meta-imagers for arbitrary all-optical convolution. Light Sci Appl, 62(2022).
[44] ZC Shen, F Zhao, CQ Jin, S Wang, LC Cao et al. Monocular metasurface camera for passive single-shot 4D imaging. Nat Commun, 1035(2023).
[45] MW Song, L Feng, PC Huo, MZ Liu, CY Huang et al. Versatile full-colour nanopainting enabled by a pixelated plasmonic metasurface. Nat Nanotechnol, 71-78(2023).
[46] XL Jing, RZ Zhao, X Li, Q Jiang, CZ Li et al. Single-shot 3D imaging with point cloud projection based on metadevice. Nat Commun, 7842(2022).
[47] XL Jing, Y Li, JJ Li, YT Wang, LL Huang. Active 3D positioning and imaging modulated by single fringe projection with compact metasurface device. Nanophotonics, 1923-1930(2023).
[48] SS He, RS Wang, HL Luo. Computing metasurfaces for all-optical image processing: a brief review. Nanophotonics, 1083-1108(2022).
[49] Z Bomzon, G Biener, V Kleiner, E Hasman. Space-variant Pancharatnam–Berry phase optical elements with computer-generated subwavelength gratings. Opt Lett, 1141-1143(2002).
[50] X Yin, Z Ye, J Rho, Y Wang, X Zhang. Photonic spin Hall effect at metasurfaces. Science, 1405-1407(2013).
[51] XH Ling, XX Zhou, XN Yi, WX Shu, YC Liu et al. Giant photonic spin Hall effect in momentum space in a structured metamaterial with spatially varying birefringence. Light Sci Appl, e290(2015).
[52] L Peng, H Ren, YC Liu, TW Lan, KW Xu et al. Spin Hall effect of transversely spinning light. Sci Adv, eabo6033(2022).
[53] SQ Liu, SZ Chen, SC Wen, HL Luo. Photonic spin Hall effect: fundamentals and emergent applications. Opto-Electron Sci, 220007(2022).

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20