
Zhirong Tang, Mingzhe Liu, Chang Wang, Yue Jiang. Point Cloud Registration Based on Multi-Dimensional Mixed Cauchy Distribution[J]. Acta Optica Sinica, 2019, 39(1): 0115005
- Acta Optica Sinica
- Vol. 39, Issue 1, 0115005 (2019)
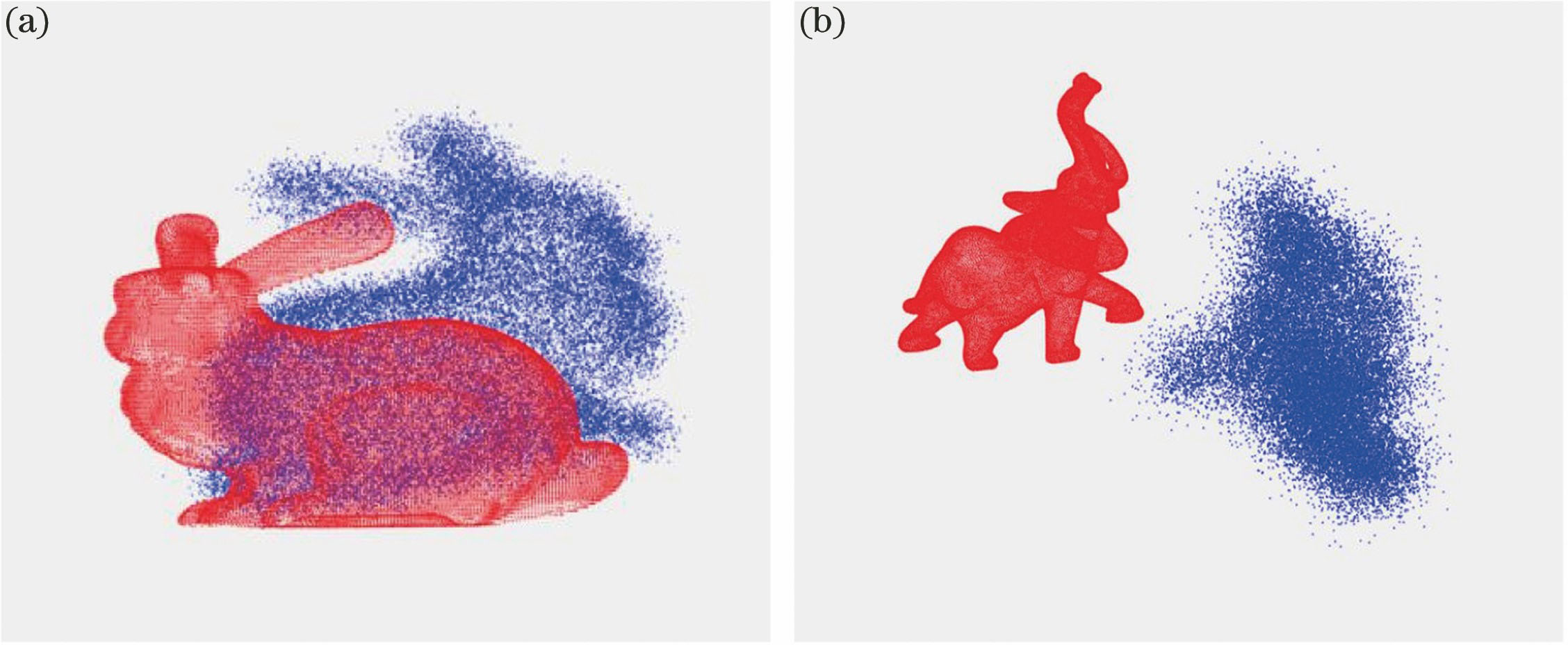
Fig. 1. Initial states of point clouds of (a) Bunny and (b) Elephant
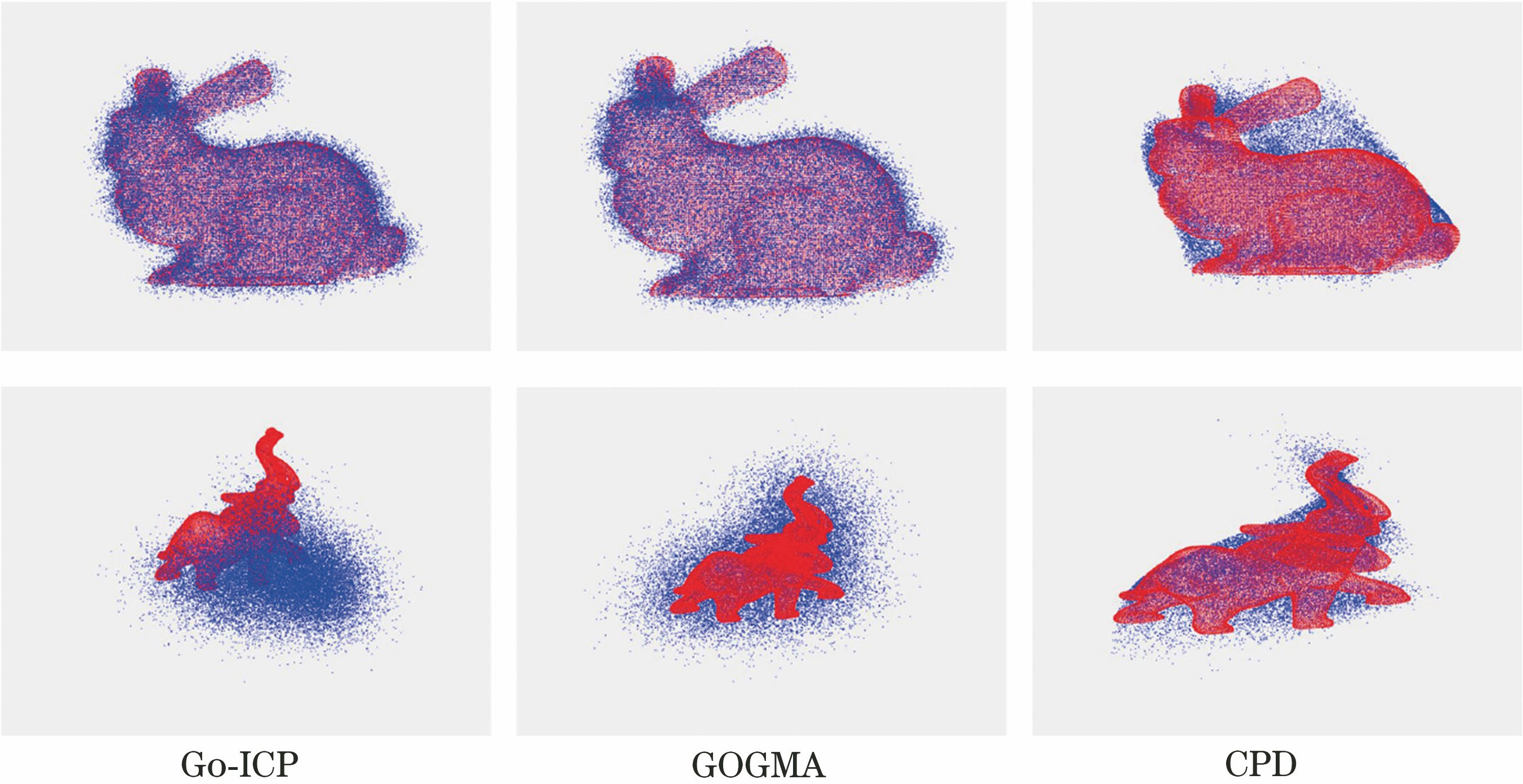
Fig. 2. Corresponding relationship between two point clouds after registration
Fig. 3. Corresponding relationship of Bunny point cloud after registration
Fig. 4. Corresponding relationship of Elephant point cloud after registration
Fig. 5. Corresponding relationship of Bunny point cloud after registration for each algorithm. (a) Registration with data-missing of 25%; (b) registration with data-missing of 50%; (c) registration with data-missing of 75%
Fig. 6. Corresponding relationship of Elephant point cloud after registration for each algorithm. (a) Registration with data-missing of 25%; (b) registration with data-missing of 50%; (c) registration with data-missing of 75%
Fig. 7. RMSE for six registration algorithms. (a) Bunny point cloud; (b) Elephant point cloud
Fig. 8. RMSE for six registration algorithms. (a) Bunny point cloud; (b) Elephant point cloud
Fig. 9. Initial states of point clouds of (a) Bunny and (b) Elephant
Fig. 10. Corresponding relationship between two point clouds after registration. (a)(b) Bunny point cloud; (c)(d) Elephant point cloud
Fig. 11. Two sets of physical maps. (a) Box A; (b) box B
Fig. 12. Initial states of two sets of scanning data. (a) Box A; (b) box B
Fig. 13. Registration results of box A point cloud
Fig. 14. Registration results of box B point cloud
| |||||||||||||||||||||||||||
Table 1. RMSE for six registration algorithms
| |||||||||||
Table 2. RMSE for two registration algorithms
| |||||||||||||||||||||||||||
Table 3. RMSE for six registration algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20