
Raobo Li, Xiping Yuan, Shu Gan, Rui Bi, Sha Gao, Yan Guo. Point Cloud Registration Method Based on Dual Quaternion Description of Line-Planar Feature Constraints[J]. Acta Optica Sinica, 2022, 42(2): 0214003
- Acta Optica Sinica
- Vol. 42, Issue 2, 0214003 (2022)
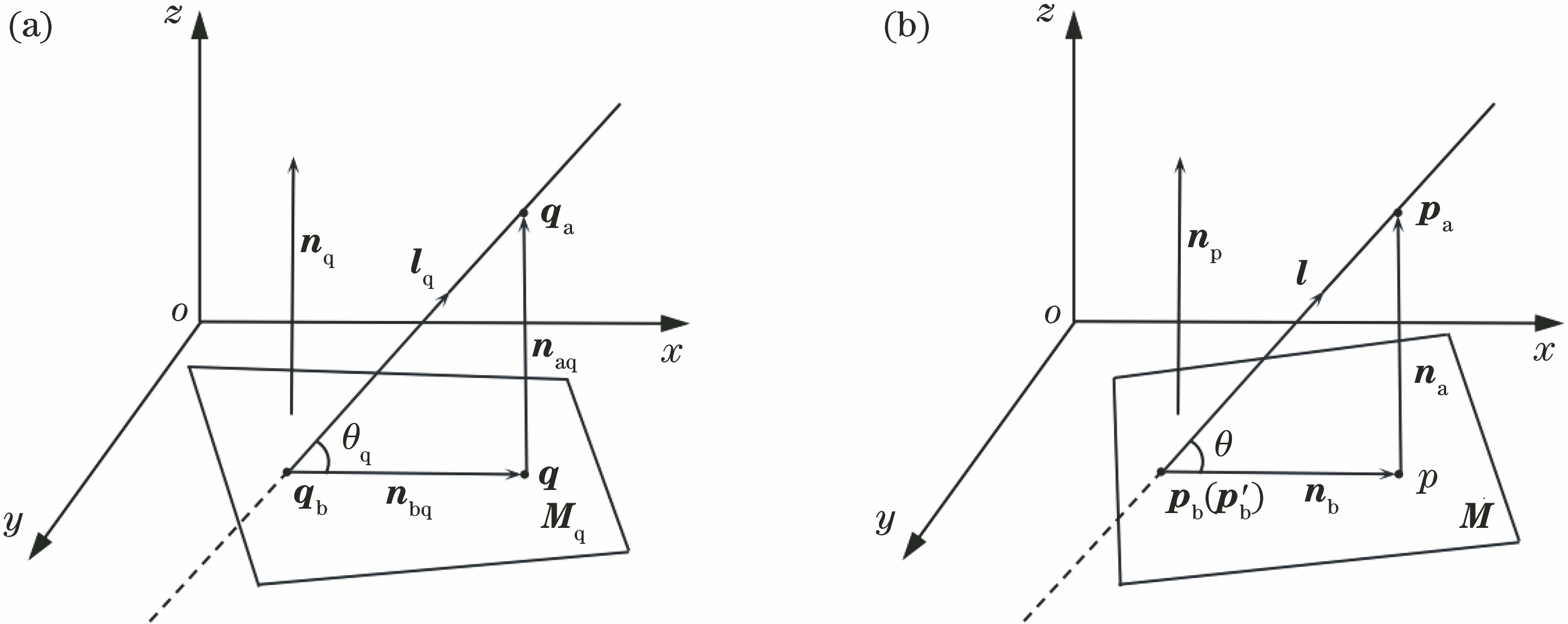
Fig. 1. Spatial geometric relation between straight line and plane. (a) Selected line-planar features in un-registered point cloud; (b) selected line-planar features in target point cloud
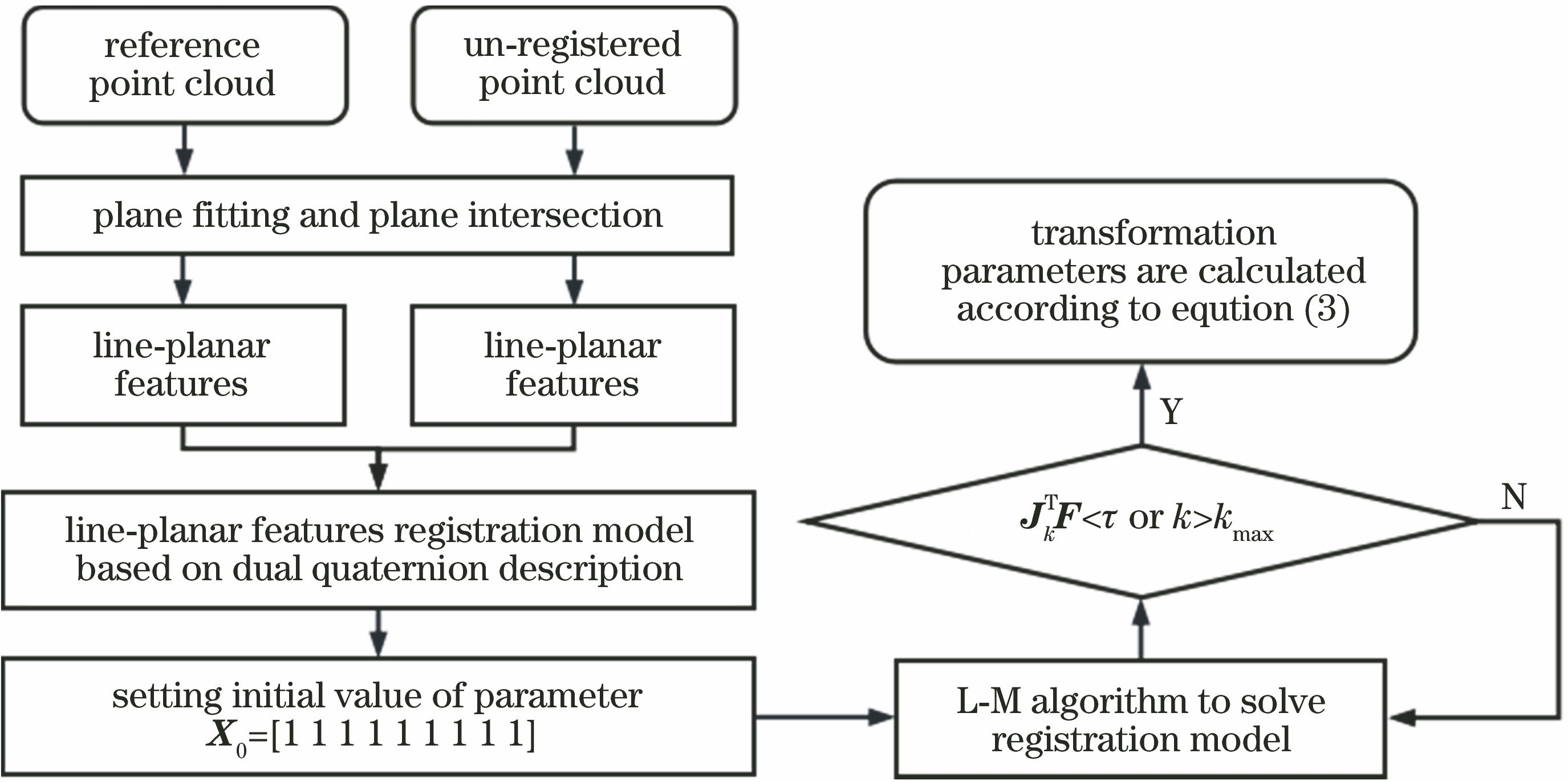
Fig. 2. Flowchart of point cloud registration algorithm
Fig. 3. Point cloud data of station 16 and station 17 before and after registration. (a) Before registration; (b) after registration
Fig. 4. Influence of noise standard deviation on registration accuracy under different conditions. (a) Angle between lines; (b) angle between planes
Fig. 5. Registration results of Ref. [7,14]. (a) Ref. [7]; (b) Ref. [14]
|
Table 1. Real value of dual quaternion considering scale factor and calculated value of proposed method
|
Table 2. Number of iterations and running time of L-M algorithm and Gaussian-Newton algorithm under different initial values
|
Table 3. Spatial transformation parameters calculated by different methods
|
Table 4. Angle between line and line, surface and surface and their errors

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20