
Yunduo Li, Jin Che, Cheng Xue. Simultaneous Localization and Mapping Based on Point and Line Feature Matching[J]. Laser & Optoelectronics Progress, 2022, 59(2): 0210003
- Laser & Optoelectronics Progress
- Vol. 59, Issue 2, 0210003 (2022)
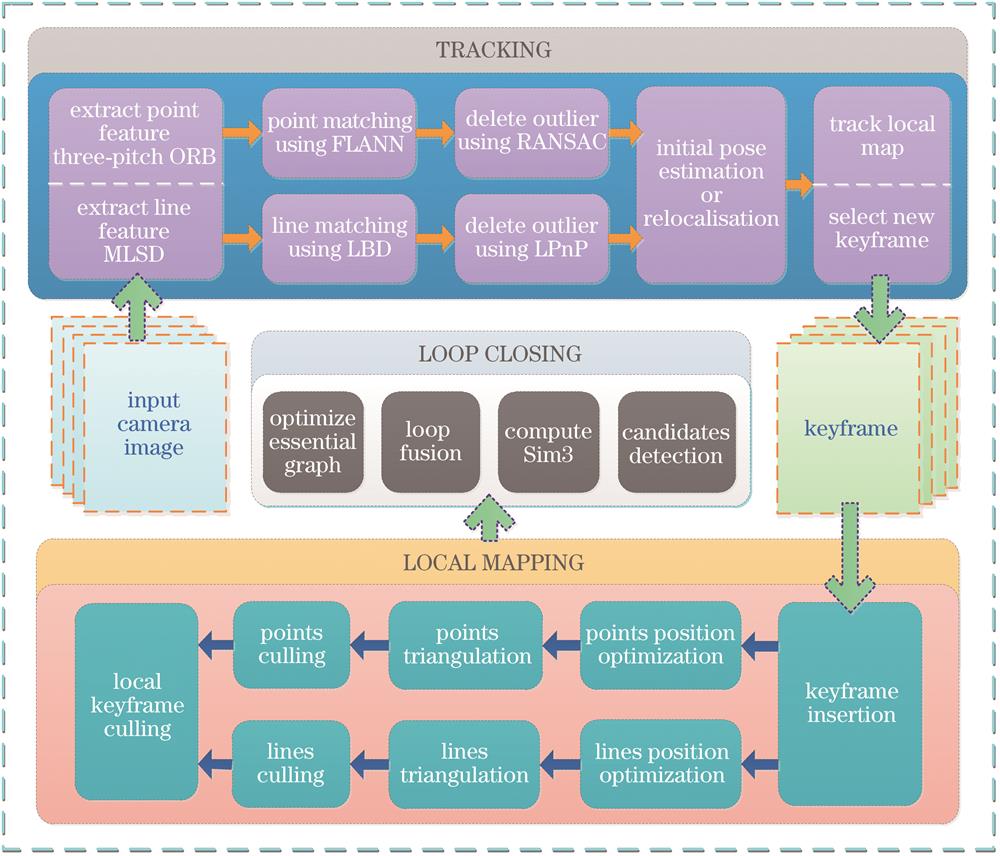
Fig. 1. Frame diagram of proposed algorithm
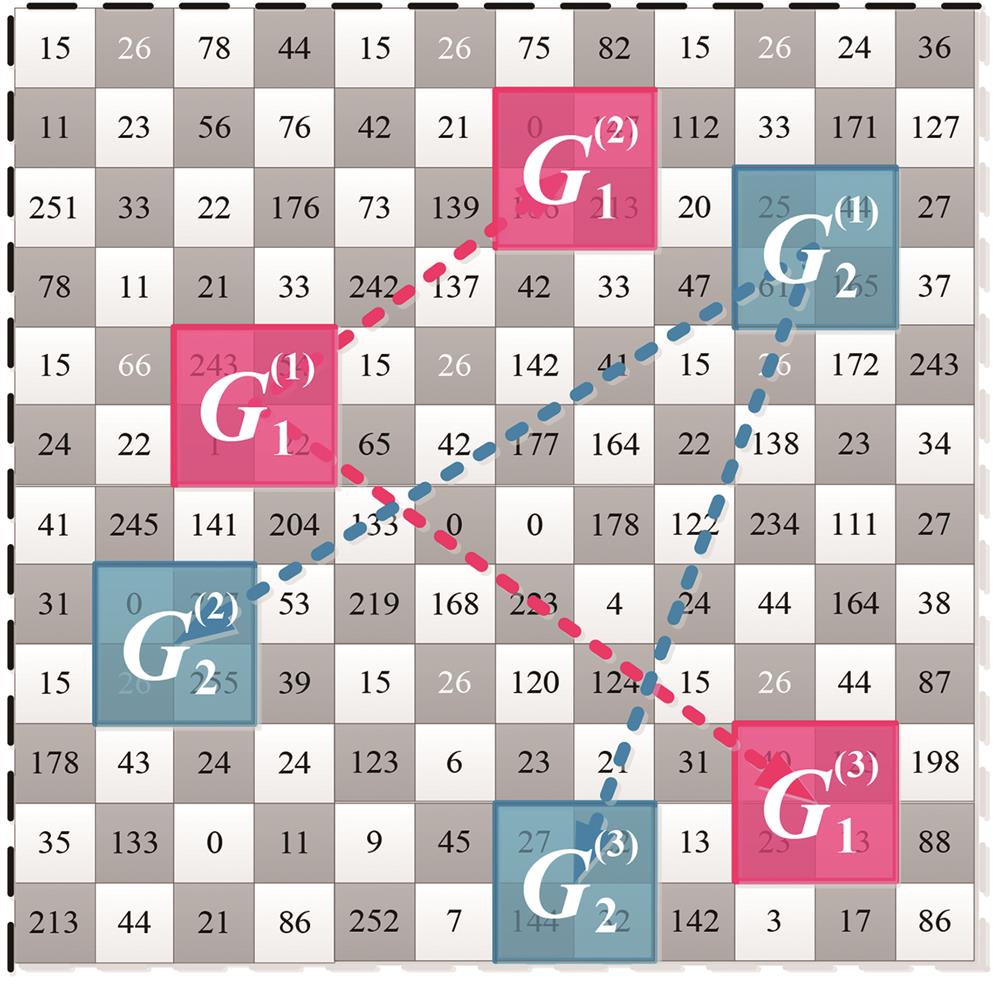
Fig. 2. Schematic diagram of feature calculation
Fig. 3. Point feature extraction and matching
Fig. 4. Line projection error analysis diagram
Fig. 5. Line feature extraction and matching
Fig. 6. Point cloud plan of datasets. (a) V1_03_difficult; (b) V2_01_easy
Fig. 7. Test on V1_03_difficult. (a) PL-SLAM; (b) PL-VINS; (c) ORB-SLAM; (d) proposed algorithm
Fig. 8. Test on V2_01_easy. (a) PL-SLAM; (b) PL-VINS; (c) ORB-SLAM; (d) proposed algorithm
Fig. 9. Running tracks. (a) V1_02_medium; (b) V2-02-mdeium; (c) MH-02-easy; (d) MH-03-medium
|
Table 1. RMSE comparison of various SLAM algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20