
Guangfu Xu, Jichao Zeng, Xixiang Liu. Visual Odometer Based on Optical Flow Method and Feature Matching[J]. Laser & Optoelectronics Progress, 2020, 57(20): 201501
- Laser & Optoelectronics Progress
- Vol. 57, Issue 20, 201501 (2020)
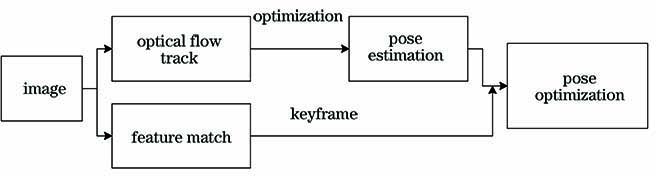
Fig. 1. Flow chart of algorithm
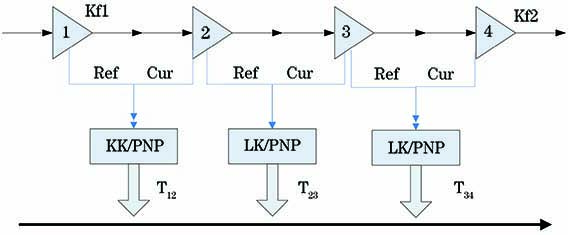
Fig. 2. Schematic of referenced-frame/current-frame VO
Fig. 3. Schematic of optical-flow/feature-matching fusion. (a) Optical flow method; (b) feature matching introduced in optical flow method
Fig. 4. Relationship among different frame rates
Fig. 5. Schematic of reprojection error
Fig. 6. Trace map of proposed algorithm
Fig. 7. Estimated traces of different algorithms on EuRoC dataset. (a) V1_01_easy image; (b) V1_02_medium image
Fig. 8. Time consumption test results of three methods. (a) Feature method; (b) optical flow method; (c) proposed algorithm; (d) time average of three methods
|
Table 1. RMSEs of three algorithms unit: m

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20