
Tianxi Zhang, Jun Zhou, Huali Liao, Gen Yang. Simultaneous Localization and Mapping Strategy of Graph Optimization Based on Three-Dimensional Laser[J]. Laser & Optoelectronics Progress, 2019, 56(20): 201502
- Laser & Optoelectronics Progress
- Vol. 56, Issue 20, 201502 (2019)
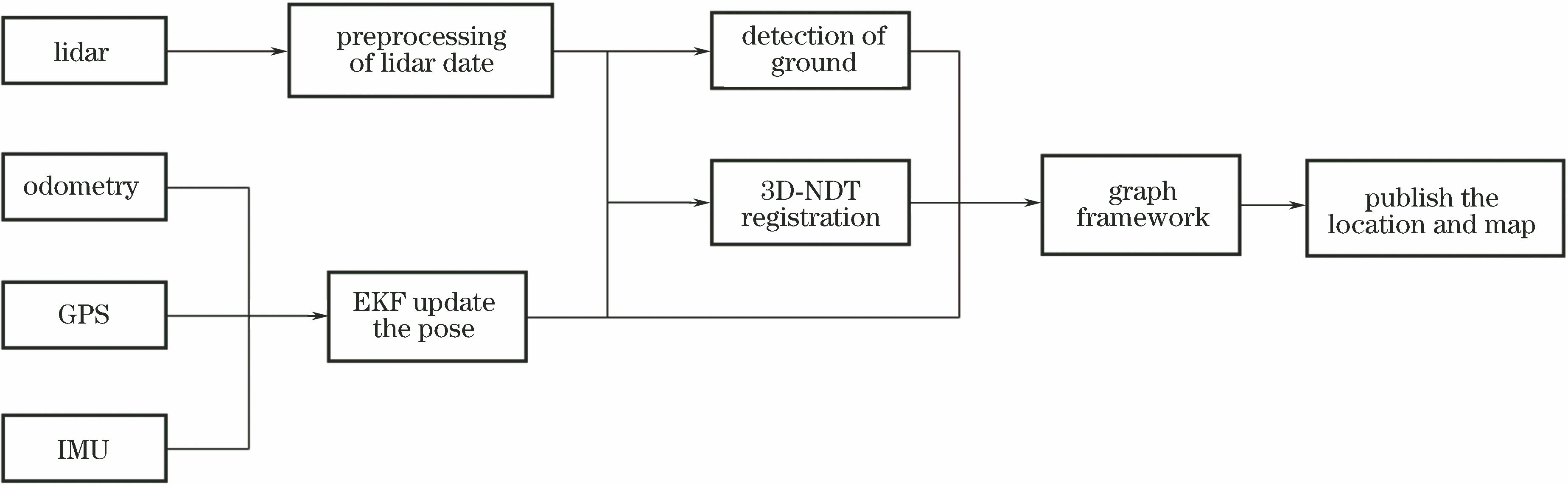
Fig. 1. Flow chart of the proposed algorithm
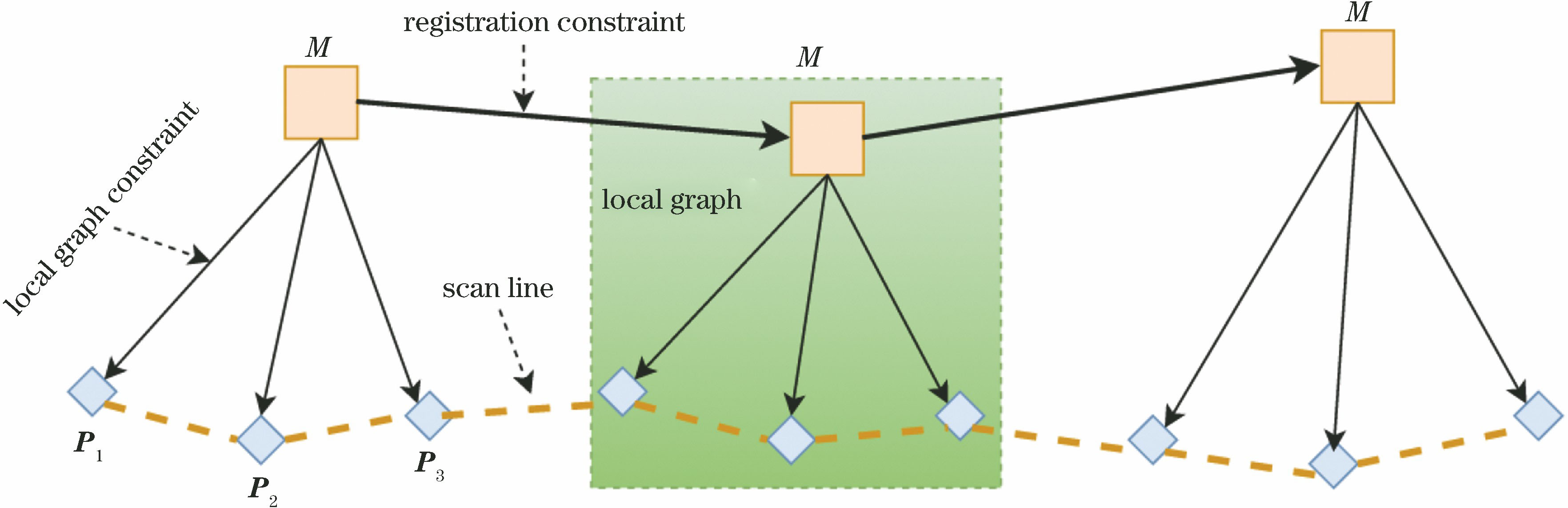
Fig. 2. Frame of global map and local graph optimization
Fig. 3. Platform of experiment
Fig. 4. Examples of two frame registration. (a) Point cloud before registration; (b) point cloud after registration
Fig. 5. Analysis of extended Kalman filter fusion location accuracy. (a) Error of x-axis; (b) error of y-axis; (c) error of z-axis
Fig. 6. Comparison of three different algorithms in indoor scene. (a) Results from 3D-NDT algorithm; (b) results from BLAM SLAM; (c) results from LOAM SLAM
Fig. 7. Comparison of three different algorithms in outdoor scene. (a) Results from 3D-NDT algorithm; (b) results from BLAM SLAM; (c) results from LOAM SLAM
Fig. 8. Effect of 3D-NDT mapping. (a) Real indoor scene; (b) point cloud map of indoor scene; (c) point cloud map of outdoor scene; (d) real outdoor scene
| ||||||||||||||||||||||||
Table 1. Time andaccuracy analysis of object mapping in indoor and outdoor environment

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20