
Wanxin Shi, Xi Jiang, Zheng Huang, Xue Li, Yuyang Han, Sigang Yang, Haizheng Zhong, Hongwei Chen. Lensless opto-electronic neural network with quantum dot nonlinear activation[J]. Photonics Research, 2024, 12(4): 682
- Photonics Research
- Vol. 12, Issue 4, 682 (2024)
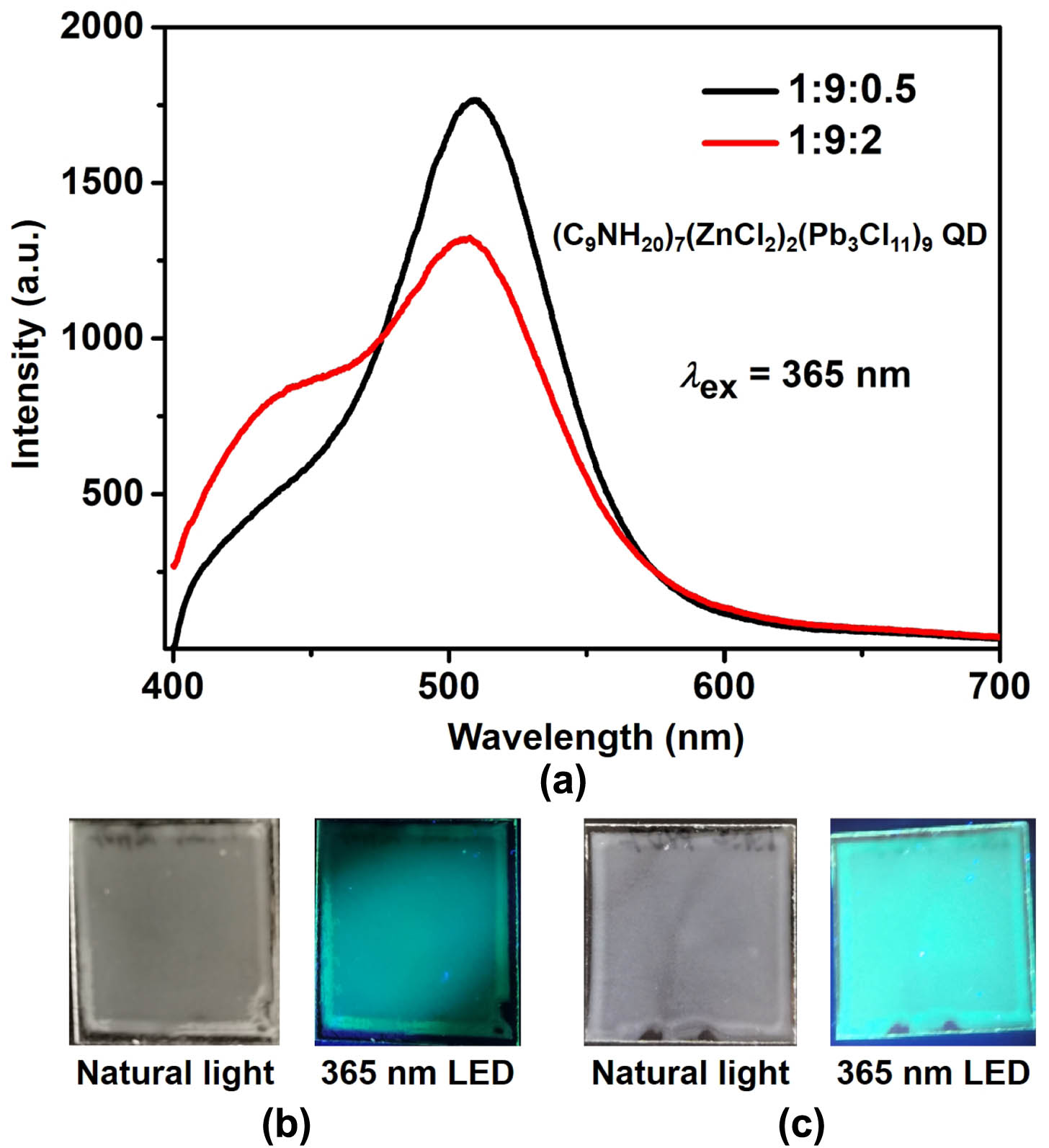
Fig. 1. Photoluminescence of ( C 9 NH 20 ) 7 ( ZnCl 2 ) 2 ( Pb 3 Cl 11 ) 9
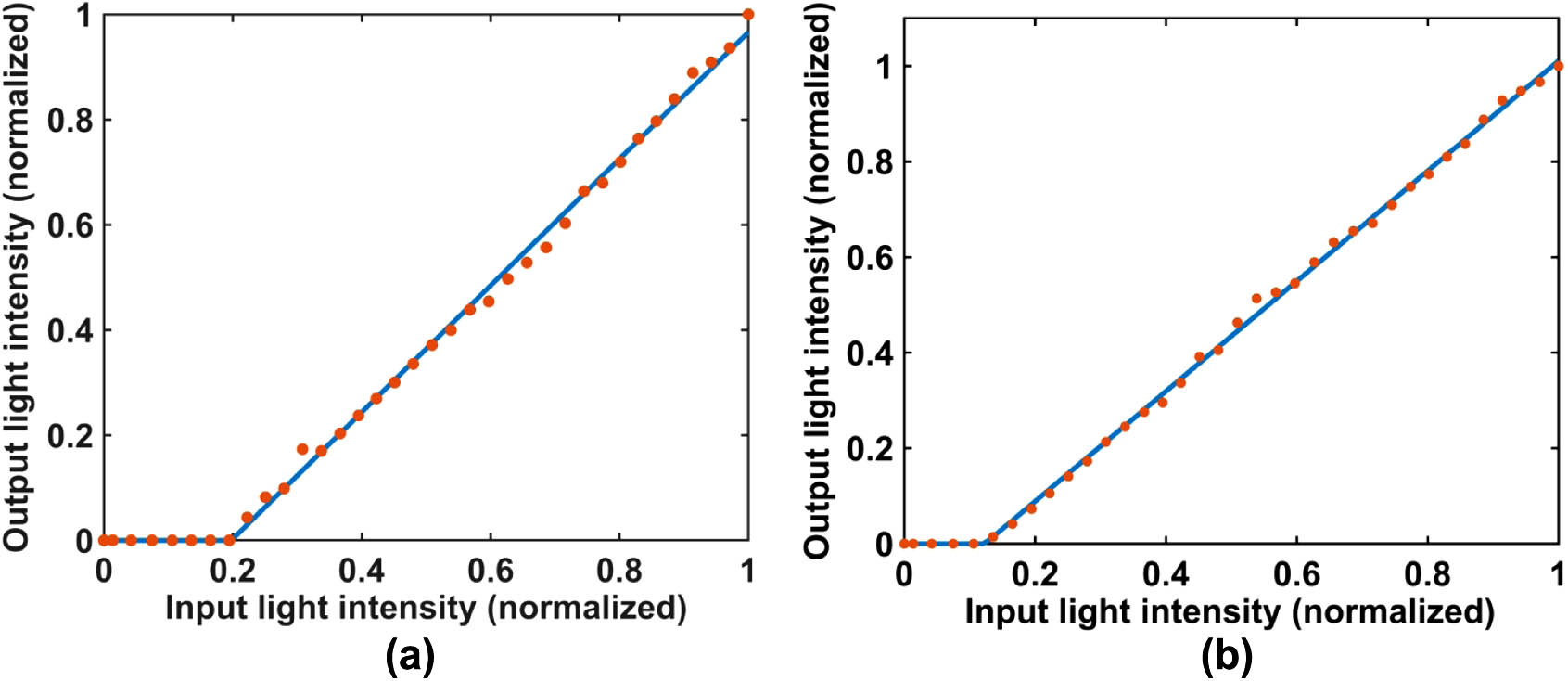
Fig. 2. Fitting nonlinear curves of quantum dots with different component molar ratios. (a) 1:9:2. (b) 1:9:0.5.
Fig. 3. Prototype for the lensless opto-electrical neural network system with optical nonlinearity. (a) Optical path diagram of the system. (b) Corresponding network structure diagram of the system.
Fig. 4. Joint optimization process based on quantum dot nonlinearity.
Fig. 5. Visual tasks and the corresponding networks used in the experiment. Among them, the left side of (a)–(c) is part of the visual task dataset, the middle is the optical mask pattern optimized for the corresponding task, and the right side is the neural network architecture of the corresponding visual task. (a) Hand sign classification. (b) Hand drawn image classification. (c) Traffic sign classification.
Fig. 6. Captured images. (a) Captured images of three visual tasks, which were rendered from raw data. (b) Comparison of images between linear and nonlinear systems. “Linear_exp” refers to the images captured in the linear system experiment, “Nonliear_sim” refers to the result of adding the measured QD nonlinearity to the images captured in the linear system experiment, and “Nonlinear_exp” refers to the images captured in the nonlinear system experiment. The red box in the figure is the enlarged part; the enlarged image is in the bottom-right corner. The “comparison” figures on the right side represent the comparisons of pixel values at the yellow line position of the corresponding three images.
Fig. 7. Results for optical nonlinear system. (a) Experimental recognition accuracy of hand sign, hand drawn image, and traffic sign classification tasks. (b) Confusion matrices of the three visual tasks based on experimental raw data. The abscissa is “predicted labels,” and the ordinate is “true labels.”

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20