
Qi-xing TANG, Yi ZHOU, Pang-da DAI, Yan-wei GAO, Bo-qiang FAN, Meng-qi LI, Ying HE, Kun YOU, Yu-jun ZHANG. Research on Constant Temperature Two-Color Light Sources for Nighttime Visibility Estimation[J]. Spectroscopy and Spectral Analysis, 2021, 41(1): 312
- Spectroscopy and Spectral Analysis
- Vol. 41, Issue 1, 312 (2021)
Abstract
Keywords
Introduction
Visibility is the maximum horizontal distance that can be seen[
However, in the process of nighttime visibility measurement by using a digital camera, the measurement is inevitably affected by the background light, the gray level of the light source, etc., resulting in unstable visibility measurement, low precision of observation results and small observation range[
1 Measurement principle
The nighttime visibility camera principle is based on the transmissive principle. According to Beer-Lambert’s law
(1)
where I0 denote the initial light intensity of the parallel beam, I denotes the transmitted light intensities, and σ is the atmospheric extinction coefficient. By designing the constant temperature dual light sources, the influence of ambient temperature change on the light intensity is reduced. Constant voltage and the constant current module are used to ensure the consistency of the dual sources light intensity. The integrating sphere is used to ensure the uniformity of the light intensity. According to different penetrating powers of different frequency bands, the two-color light sources are used to achieve high-precision and wide-range visibility.
According to Koshmieder’s definition, the color temperature is 2 700 K. When the light intensity decays to the human visual threshold k=0.05, the atmospheric visibility V and the atmospheric extinction coefficient σ can be expressed as
(2)
And so
(3)
where the initial light intensity I0 of the light source is unknown, a dual light source visibility measurement method is proposed.
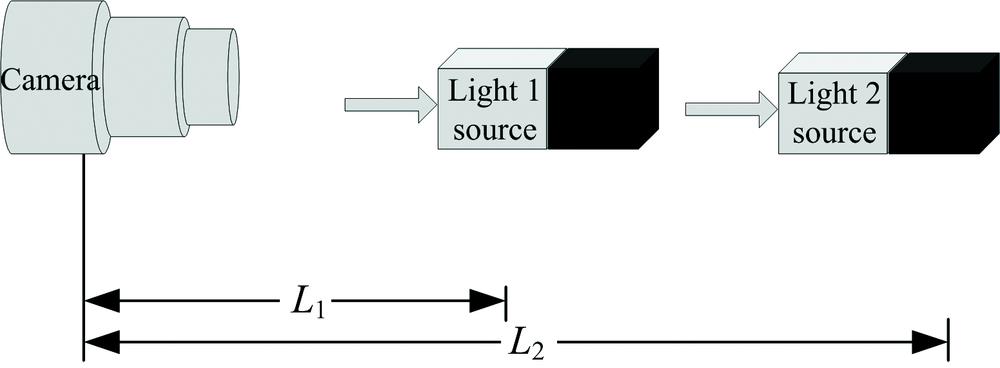
According to the literature [14] and [15], the diagram of the dual light source visibility measurement method is shown in Fig.1. The light source 1 and 2 are respectively separated from the cameras L1 and L2 (L1>L2). Then Eqs. (1) changes to
(4)
where I01 and I02 are the initial light intensity of the parallel beam source 1 and source 2, respectively, I1 and I2 are their transmitted light intensities, and σ is the atmospheric extinction coefficient.
![]()
Figure 1.The diagram of the dual light sources visibility measurement method
The black block is bold
Therefore
(5)
2 A method for nighttime visibility estimation based on constant temperature two-color light sources
Based on the literature [14] and [15], a method for nighttime visibility estimation based on constant temperature two-color light sources has been proposed. The light source 1 and 2 are respectively separated from the cameras L1 and L2, and they are two-color light sources.By designing the constant temperature dual light sources, the influence of ambient temperature change on the light intensity is reduced. The constant feedback voltage and the constant current module are used to ensure the consistency of the dual sources light intensity. The integrating sphere is used to ensure the uniformity of the light intensity.
White LED is often used as the source of visibility measurement, but the white LED is susceptible to background light. Under different visibility, when the laser transmission distance is 100 m, the relationship between wavelength and transmittance is shown in Fig.2.
![]()
Figure 2.The relationship between wavelength and transmittance
The visibility is 40, 50, 60
It is known that the transmittance of red light is high, whereas the transmittance of blue light is low. With a two-color source, the difference in transmittance of blue light in the case where ΔL=L1-L2 is a constant becomes
(6)
where λb is the blue light wavelength.
The difference in transmittance of red light is
(7)
where λr is the red light wavelength.
As can be seen from Fig.2, ΔI(λb)>ΔI(λr) in the range of visible light. Therefore, Red and blue LEDs are used as light sources for visibility measurement.
It is known that the initial light intensity of dual light sources is the same at any time. When the light source is red, the Eqs. (4) changes to
(8)
where I01(λs) and I02(λr) are the initial light intensity of the parallel beam source 1 and source 2, respectively, I1(λr) and I2(λr) are their transmitted light intensities, and σ is the atmospheric extinction coefficient.
Therefore
(9)
When the light source is blue, the Eqs. (4) changes to
(10)
where I01(λb) aod I02(λb) are the initial light intensity of the parallel beam source 1 and source 2, respectively,I1(λb) and I2(λb) are their transmitted light intensities.
Therefore
(11)
From the Eqs.(4), (9) and (11), it is known that in the same environment, the atmospheric visibility is calculated by using different wavelength sources. In the case of good visibility, the blue LED is used as the light source for visibility measurement. The difference in blue transmittance is large, which is beneficial to improve the signal-to-noise ratio and increase accuracy. When the visibility is poor, the light intensity of the blue light reaching the camera is weak, which causes error interference to the measurement. At this time, the red LED is used for visibility measurement. The accuracy of nighttime visibility measurement is improved by the two-color light source.
3 A visibility observation system based on constant temperature two-color light sources
The structure diagram of the visibility observation system based on the constant temperature two-color light source is shown in Fig.3. It mainly includes constant voltage and constant current module of dual light sources, the light intensity comparison module, the light source thermostat module, the PID temperature control module, optical structure part, data processing part, etc.
![]()
Figure 3.The structure diagram of the visibility observation system based on the constant temperature two-color light sources
The light source 1 and 2 are respectively separated from the cameras
The volt-ampere characteristic curve of the light source is similar to the diode. A small voltage change causes a large fluctuation of the current. The brightness of the light source is related to the forward current of the pn junction. As the current increases, the number of free electrons and holes injected into the pn junction of the source increases. The probability of radiation recombination increases, and the radiation intensity of the source increases until the recombination of electrons and holes tends to be saturated. At this time, the light intensity reaches a maximum value. Therefore, in order to ensure the stability of the light source intensity, a constant voltage and constant current driving module are used.
In order to ensure the consistency of the dual light sources intensity, the photon detector is used to measure the light intensity. The two light intensity signals are compared and processed. The light intensity of the dual light sources is ensured by adjusting the driving current of the light source 1.
Since the visibility system is installed in the actual environment, the measurement is inevitably affected by the ambient temperature because the temperature has an influence on the light intensity of the light source. In order to ensure the stability of the measurement, the influence of light intensity on temperature fluctuation is reduced by using PID thermostat module. The temperature of the light source is controlled at 50 ℃, higher than the ambient temperature,to eliminate the influence of ambient temperature changes on the light intensity.
The optical structure part is composed of integrating spheres and light sources. The light source drives the module so that the two light sources are simultaneously outputted in two states of blue and red. The integrating sphere ensures the uniformity of the light sources.
Finally, the image is captured by the camera, and then the atmospheric visibility is obtained through computer inversion.
4 Experimental verification
In order to verify the feasibility and versatility of the proposed method, the initial light intensity of dual light sources needs to be the same at any time. Experiments are carried out using the developed visibility observation system. The diameters of the two light sources are all 110 mm, and the MVC1000 camera has an exposure time of 10 ms.
The experimental scene to be tested remains constant during the experiment. The two photodetectors are equally spaced from the two sources. During the experiment, the ambient temperature is about 23 ℃, and the constant temperature module ensures that the temperature of the light source is unchanged at 50 ℃. First, the initial light intensity signals of the light sources are acquired by using two photodetectors. During the measurement process, the photodetector is close to the light source, which can be regarded as no extinction. The measurement results are shown in Fig.4. The consistency of the two light sources reaches 0.99. The experimental results show that the initial light intensity of the dual light sources is very consistent at any time and the fluctuation is small. The constant temperature dual light sources module is used to eliminate the influence of ambient temperature change on light intensity. The constant voltage and constant current module ensures the uniformity of dual light sources light intensity.
![]()
Figure 4.The light intensity measurement results of dual light sources. The inset: zoom in the partial image
The dual light sources are set to 20 m from the camera L1 and 50 m from the L2. The proposed method is compared with the dual light source’s method for visibility comparison experiments. Experiments are carried out in the case of a clear night, all of which are compared with real values. A series of experiments are carried out by using the established system. Method 1: Setting the dual light sources to red light and blue light, the camera images are separately acquired for inversion. Method 2: Setting the dual light sources to be white LED, the constant temperature module and the constant voltage and constant current module do not work. Then directly capture the camera image for inversion. The dual light sources observation results of red light and blue light are obtained by method 1, as shown in Figs.5 and 6, respectively. The second measurement result is shown in Fig.7. It can be seen from Fig.5 and Fig.6 that the penetration ability of the light source in different frequency bands is different. When the dual light sources are red light, the average amplitude of the fluctuation is 6.88%, while the dual light sources are blue light, the average amplitude of the fluctuation is 4.24%. It can be seen from Fig.7 that the mean value of the fluctuation by method 2 is 9.17%. It is proved that the consistency of the two methods is very good, and the stability of the proposed method is good.
![]()
Figure 5.Visibility measurement results when the dual light sources are red light
![]()
Figure 6.Visibility measurement results when the dual light sources are blue light
![]()
Figure 7.Visibility measurement results of dual light sources method
Then, in order to further evaluate the applicability of the proposed method for different weather conditions,experiments under different weather conditions are carried out. The experimental results are shown in Figs.8, 9, and 10. It can be seen from Fig.8 that the standard deviation of the dual light sources for red light is 69.217 on a rainy day, and the standard deviation of the dual light sources for blue light is 189.128. At this time, the measurement result of red light is close to the true value. It can be seen from Fig.9 that the standard deviation of the dual light sources for the red light is 92.21 in the foggy day, and the standard deviation of the blue light is 287.13. At this time, the measurement result of red light is close to the true value. It can be seen from Fig.10 that the standard deviation of the dual light sources for the red light is 247.75 on a sunny day, and the standard deviation of the blue light is 94.59. At this time, the measurement result of blue light is close to the true value.
![]()
Figure 8.Visibility measurement results on a rainy day
![]()
Figure 9.Visibility measurement results in the foggy day
![]()
Figure 10.Visibility measurement results on a sunny day The inset: zoom in the partial image
When the visibility range is up to 15 000 m, one month of experimental observation is performed. The observations of the two methods are compared with the actual values, and the statistical errors are shown in Table 1. It can be seen from Table 1 that the error of the two methods within visibility range which is up to 15 000 m is less than 11%, and the proposed method can accurately measure within the visibility range.
5 Conclusions
The nighttime visibility measurement is inevitably affected by the background light, the gray level of the light source, etc., resulting in unstable visibility measurement, low precision of observation results and small observation range. Based on the previous research, according to different penetrating powers of different frequency bands, the characteristics of the penetrating ability are analyzed in the visible range. A method for nighttime visibility estimation based on constant temperature two-color light sources has been proposed. A visibility observation system based on constant temperature two-color light sources has been established. A series of experiments have been carried out. The experimental results show that the consistency of the two light sources reaches 0.99. In a rainy and foggy day, the visibility is not good at this time. The light intensity of the blue light reaching the camera is weak and the measurement result of the red light is close to the true value. When it is sunny, nighttime visibility is good. At this time, the difference in blue transmittance is large, which is beneficial to improve the signal-to-noise ratio. The standard deviation of the blue light source is 36.90, and the measurement result of blue light is close to the true value. When the visibility range is up to 15 000 m, the proposed method can accurately measure within the visibility range.
References
[1] Q Fan, X Wang, W Liao et al. Atmos. Environ., 107, 204(2015).
[2] S Clifford, R Jayaratne E, L Morawska. Environmental Science & Technology, 49, 12751(2015).
[3] J Hannuksela, S Varjo. Singapore, 277-289, 1(2014).
[4] B Yang, G Liu, X Cheng et al. Sensors, 18, 1(2018).
[5] N Hautiere, D Aubert, P Tarel J. IEEE Transactions on Intelligent Transportation System, 11, 474(2010).
[6] G Nathan, S Newsam. Applied Computer Vision, 577(2011).
[7] N Hautière, E Dumont, B Raouf et al. Atmos. Environ., 45, 5316(2011).
[8] N Graves, S Newsam. Ecol. Inform., 23, 62(2014).
[9] R Babari, E Dumont, N Hautière et al. Transp. Res. Part C, 22, 17(2012).
[10] W Kim K. Environ. Monit. Assess, 187, 66(2015).
[11] C Zhang, T Sun, J Chen et al. 3rd International Conference on Information Management (ICIM). IEEE(2017).
[12] W Weiming, Y Yang, L Cewu et al. IEEE Trans Image Process, 28(2019).
[13] D Allard, I Tombach. Atmos. Environ., 15, 1847(1981).
[14] Yu-jun ZHANG, Chang-hua LU, Pang-da DAI et al. Spectroscopy and Spectral Analysis, 34, 1(2014).
[15] Yu-jun ZHANG, Pang-da DAI, Chang-hua LU et al. Spectroscopy and Spectral Analysis, 34, 2351(2014).
[16] R Xiao S, J Zhou, Y Wu Q et al. Journal of Applied Optics, 35, 1016(2014).
[17] L Liu X, C Liu J, L Wang J et al. Acta Electronica Sinica, 46, 1306(2018).

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20