
Zhongyang Zhao, Yinglei Cheng, Xiaosong Shi, Xianxiang Qin, Xin Li. Terrain Classification of LiDAR Point Cloud Based on Multi-Scale Features and PointNet[J]. Laser & Optoelectronics Progress, 2019, 56(5): 052804
- Laser & Optoelectronics Progress
- Vol. 56, Issue 5, 052804 (2019)
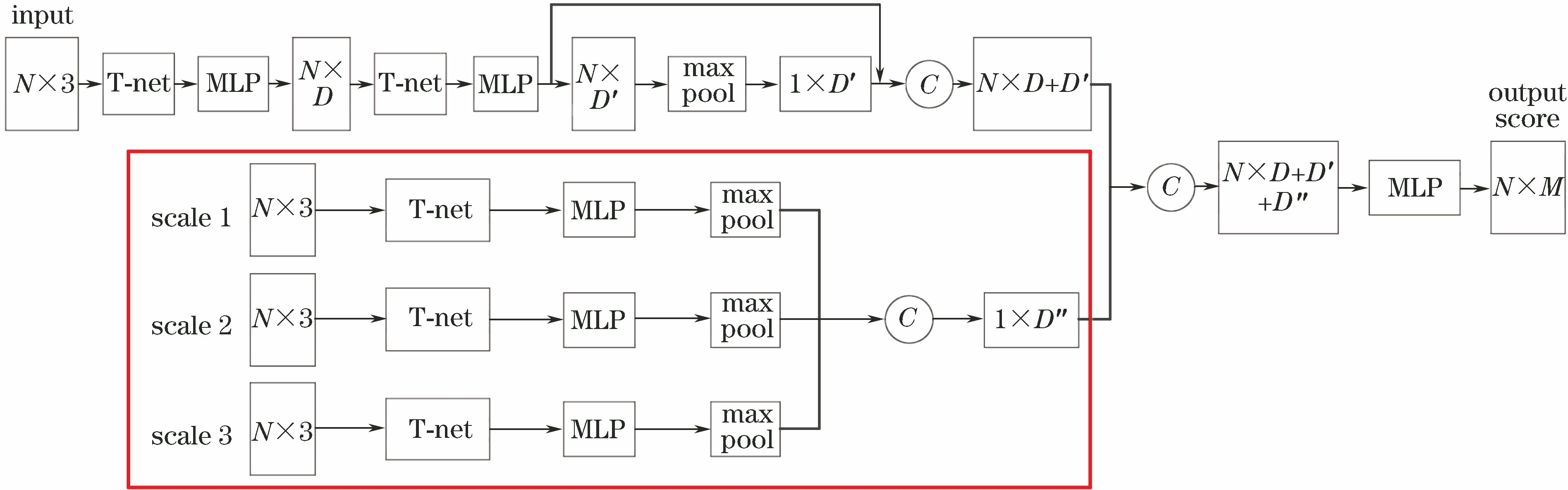
Fig. 1. Deep neural network model combining multiscale features with PointNet
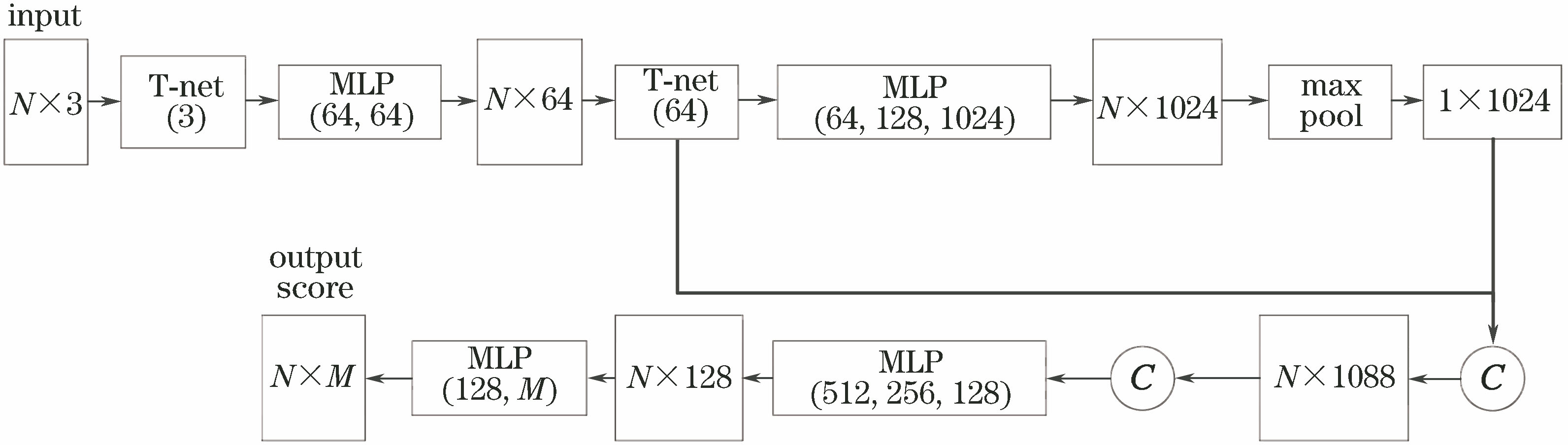
Fig. 2. PointNet network architecture
Fig. 3. Neighbors of different scales in point clouds. (a) Scale 1; (b) scale 2; (c) scale 3
Fig. 4. Point cloud of Semantic 3D dataset. (a) Area 1; (b) area 2
Fig. 5. Point cloud of Vaihingen city dataset. (a) Area 1; (b) area 2; (c) area 3
Fig. 6. Classification results of Semantic 3D dataset. (a) Input point cloud; (b) PointNet; (c) proposed algorithm
Fig. 7. Classification results of Vaihingen city dataset. (a) Input point cloud; (b) PointNet; (c) proposed algorithm
|
Table 1. Experimental results of different scales
|
Table 2. Each category IoU of Semantic 3D dataset%
|
Table 3. Classification accuracy and runtime of Semantic 3D dataset
|
Table 4. Each category IoU of Vaihingen city dataset%
|
Table 5. Classification accuracy and runtime of Vaihingen city dataset

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20