
Fuchun Lin, Yuhong Liu, Jinfan Zhou, Zhinan Ma, Qianqian He, Manman Wang, Rongfen Zhang. Optimization of Visual Odometry Algorithm Based on ORB Feature[J]. Laser & Optoelectronics Progress, 2019, 56(21): 211507
- Laser & Optoelectronics Progress
- Vol. 56, Issue 21, 211507 (2019)
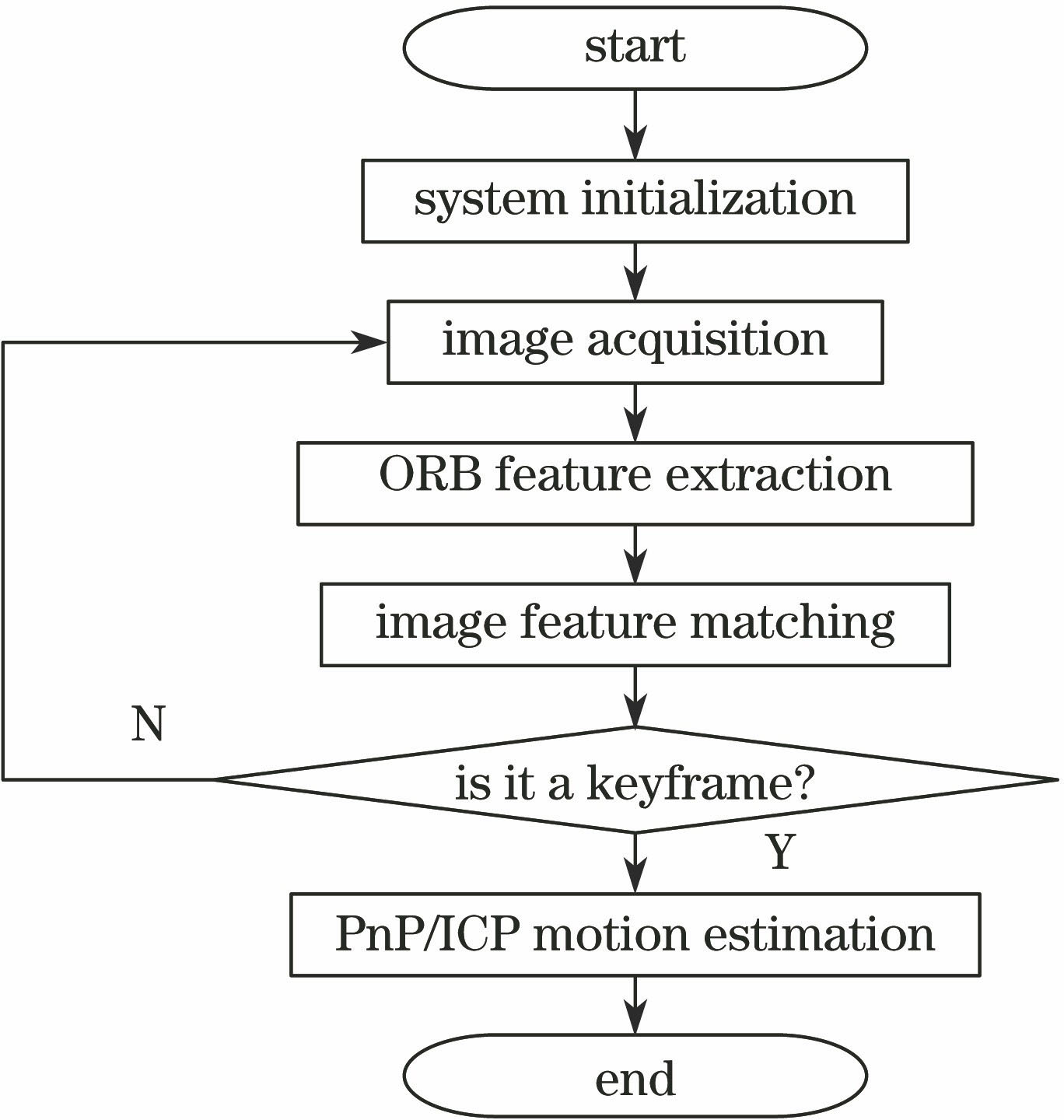
Fig. 1. Flowchart of traditional VO method
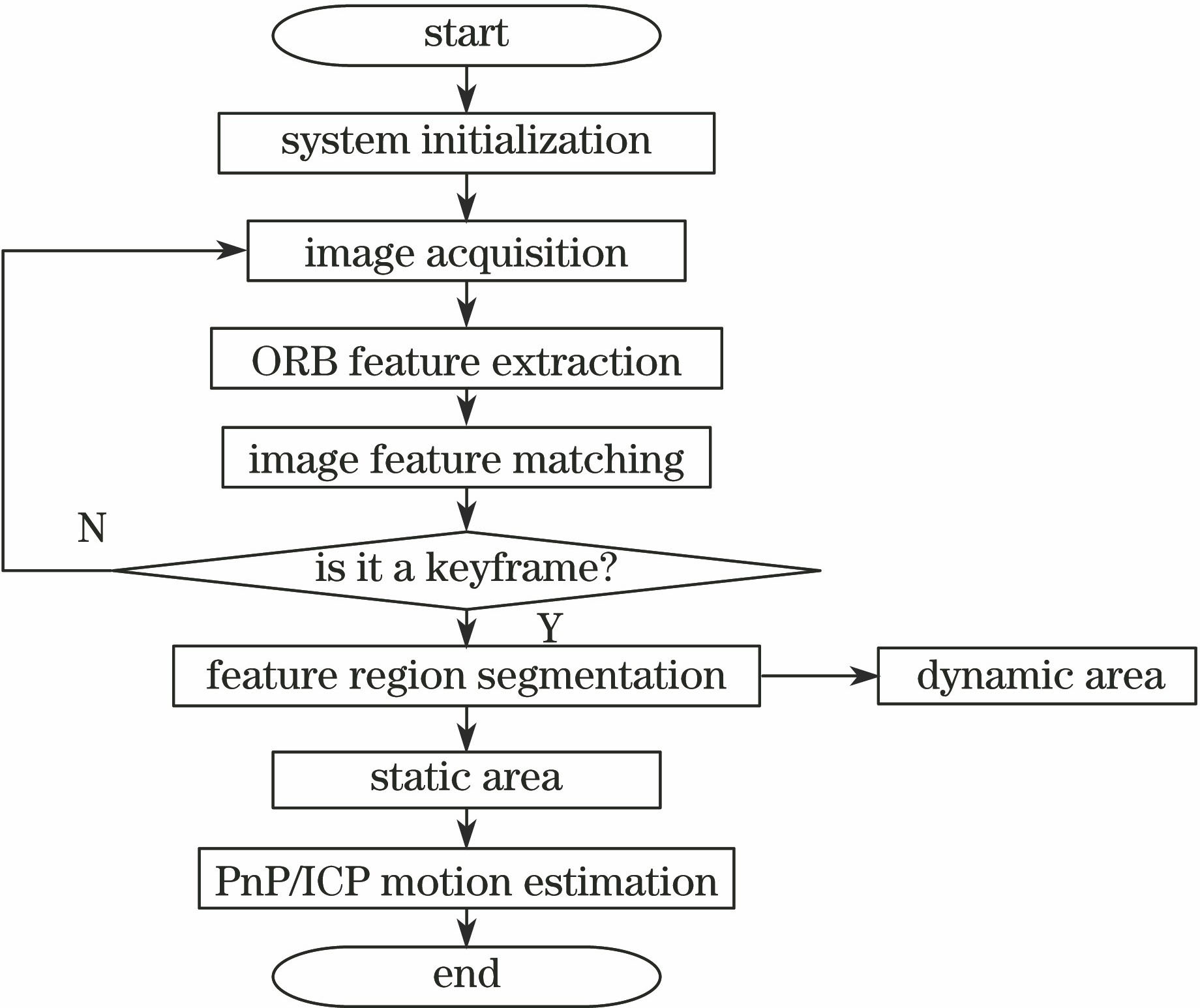
Fig. 2. Improved VO flowchart based on ORB
Fig. 3. FAST feature points
Fig. 4. Diagram of variation of adjacent feature point spacing
Fig. 5. Minimum re-projection error of camera
Fig. 6. ORB feature point extraction
Fig. 7. ORB feature point matching
Fig. 8. Triangular networks established by Delauna triangulation. (a) Triangle network of reference frame; (b) triangle network of current frame
Fig. 9. ORB front-end camera track
|
Table 1. Root mean square error of camera track
|
Table 2. Error table of camera pose estimation
| ||||||||||||||||||||||||||||||||||
Table 3. Camera motion errors in different scenes

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20