
Hongwei Li, Tao Xiong. Research on P4P Algorithm Based on Quick Response Code Recognition[J]. Laser & Optoelectronics Progress, 2020, 57(12): 121501
- Laser & Optoelectronics Progress
- Vol. 57, Issue 12, 121501 (2020)
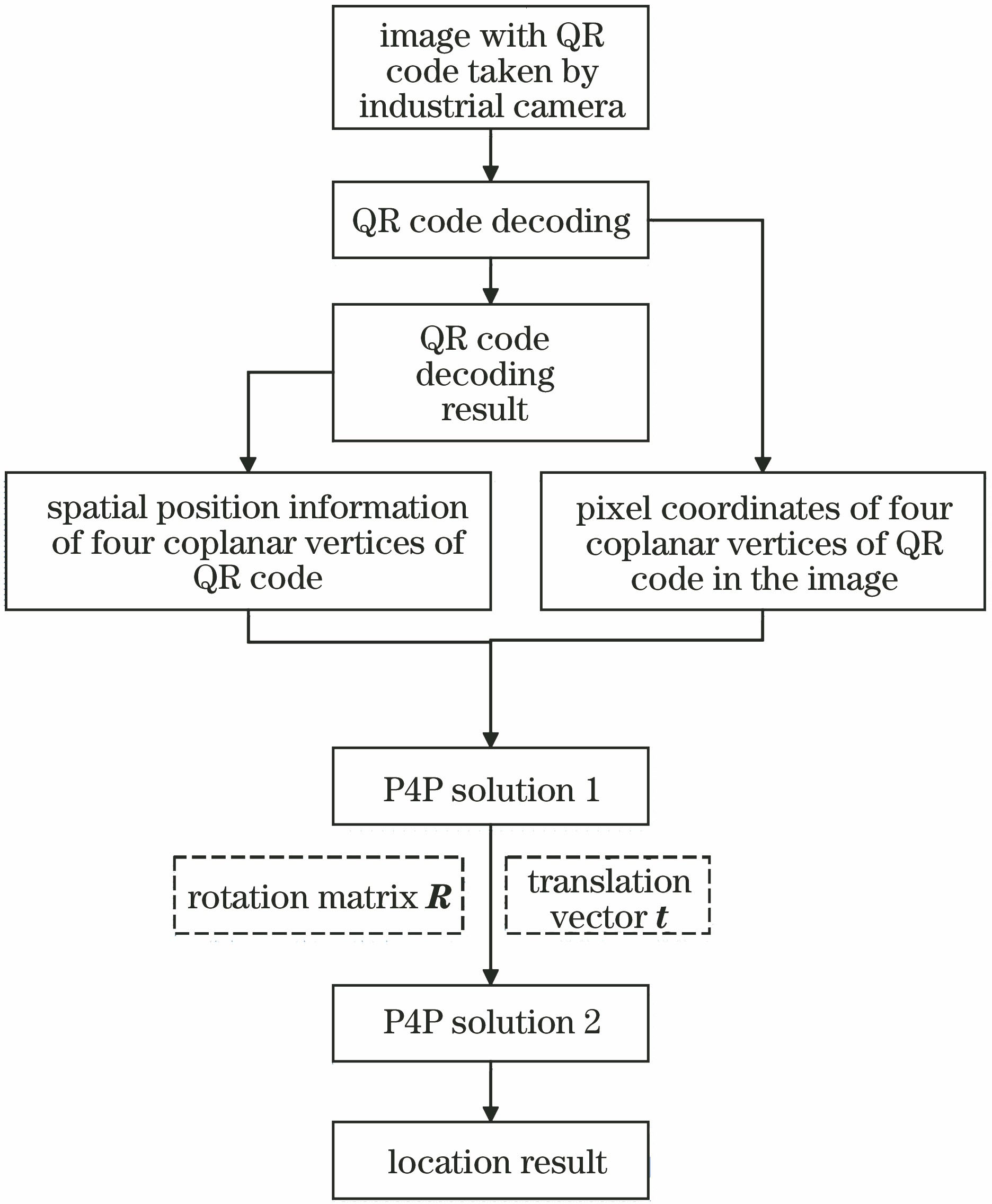
Fig. 1. Flow chart of positioning and navigation algorithm
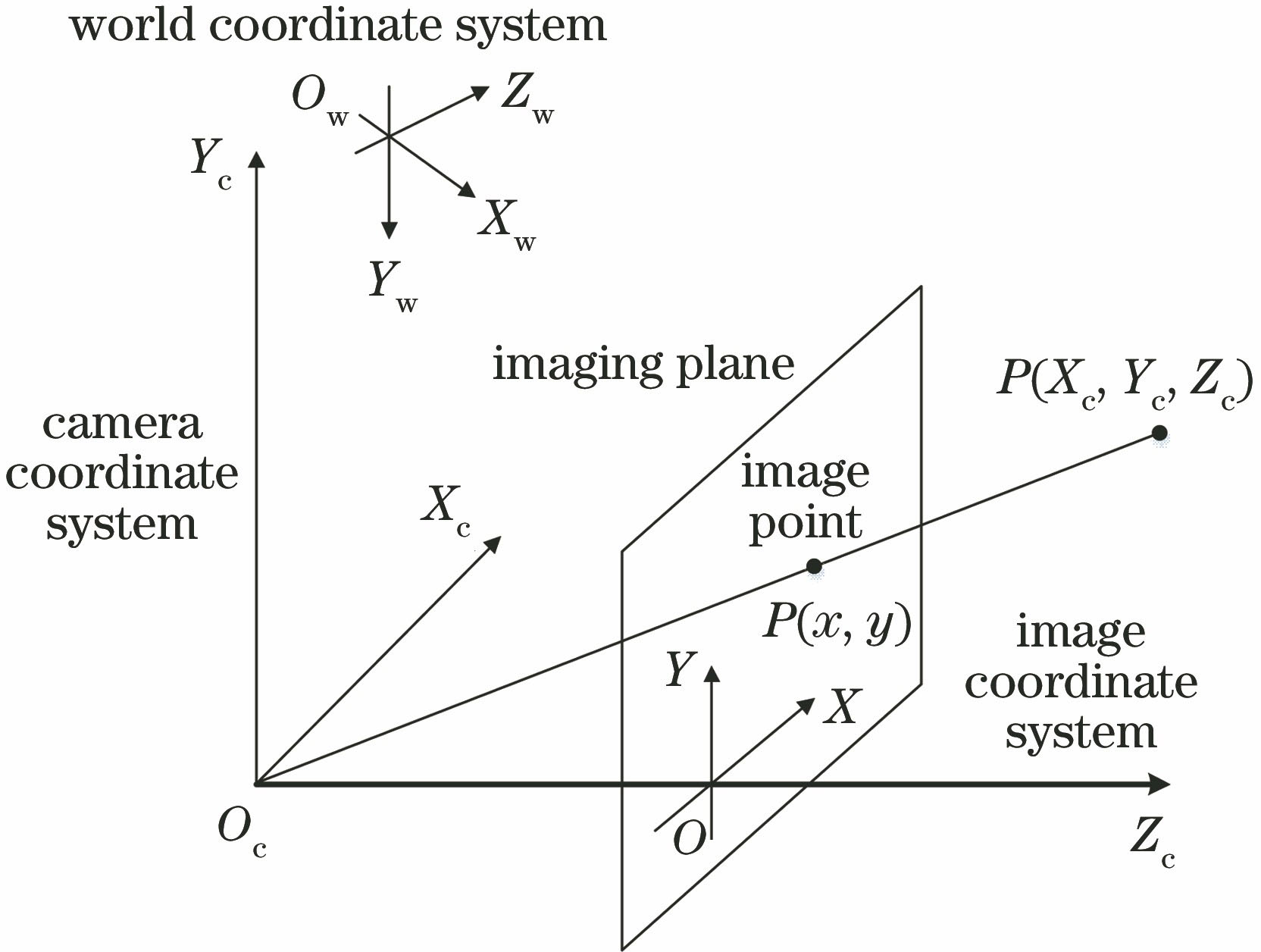
Fig. 2. Three coordinate systems in the process of PNP positioning and navigation
Fig. 3. Calibrated image
Fig. 4. Calibration images taken from different angles
Fig. 5. Simulation of experiment 2. (a) Position estimation effect diagram; (b) position estimation error; (c) angle estimation error
Fig. 6. Simulation of experiment 3. (a) Position estimation effect diagram; (b) position estimation error; (c) angle estimation error
Fig. 7. x-y plane
Fig. 8. Captured image
|
Table 1. Simulation result

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20