
Yong Wang, Chun Li. Point Cloud Adaptive Registration Algorithm Based on Color Information and Geometric Information[J]. Laser & Optoelectronics Progress, 2020, 57(20): 201015
- Laser & Optoelectronics Progress
- Vol. 57, Issue 20, 201015 (2020)
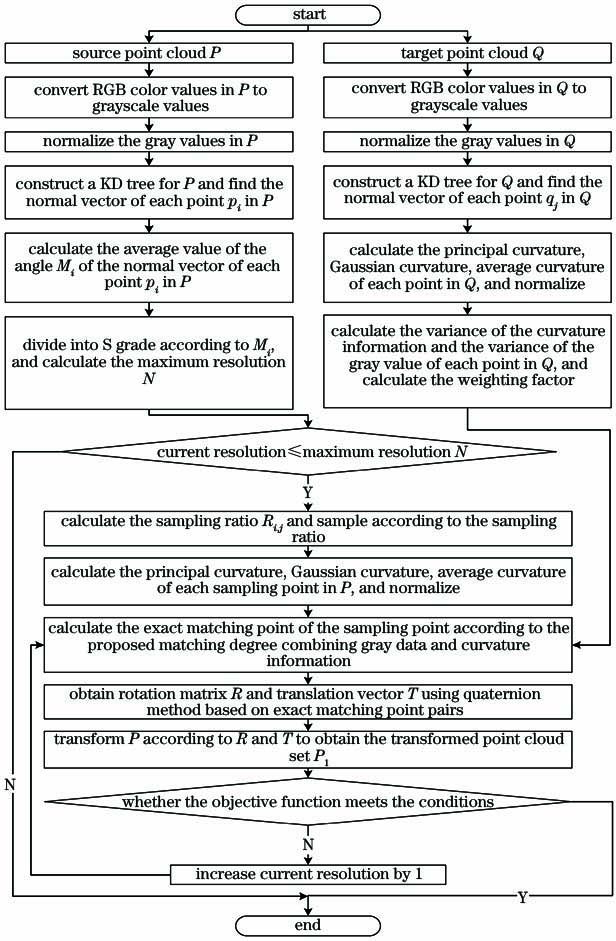
Fig. 1. Basic flow of algorithm
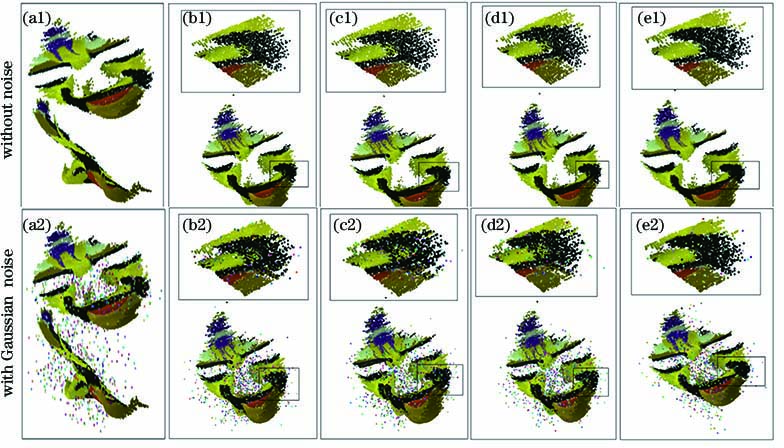
Fig. 2. Facial Makeup point cloud registration results. (a1) Initial pose of two point clouds; registration results of (b1) two point clouds under the classical ICP algorithm, (c1) 4D-ICP(Hue) algorithm, (d1) 4D-ICP (IAICP) algorithm,and (e1) proposed algorithm; (a2) initial pose of two point clouds; registration results of (b2) two point clouds under the classical ICP algorithm, (c2) 4D-ICP(Hue) algorithm, (d2) 4D-ICP (IAICP) algorithm, and (e2) proposed algorithm
Fig. 3. Kettle point cloud registration results. (a1) Initial pose of two point clouds; registration results of (b1) two point clouds under the classical ICP algorithm, (c1) 4D-ICP(Hue) algorithm, (d1) 4D-ICP (IAICP) algorithm,and (e1) proposed algorithm; (a2) initial pose of two point clouds; registration results of (b2) two point clouds under the classical ICP algorithm, (c2) 4D-ICP(Hue) algorithm, (d2) 4D-ICP (IAICP) algorithm, and (e2) proposed algorithm
Fig. 4. Plaster statue point cloud registration results. (a1) Initial pose of two point clouds; registration results of (b1) two point clouds under the classical ICP algorithm, (c1) 4D-ICP(Hue) algorithm, (d1) 4D-ICP (IAICP) algorithm, and (e1) proposed algorithm; (a2) initial pose of two point clouds; registration results of (b2) two point clouds under the classical ICP algorithm, (c2) 4D-ICP(Hue) algorithm, (d2) 4D-ICP (IAICP) algorithm, and (e2) proposed algorithm
Fig. 5. Time comparison line chart of registration results. (a) Time of each method on different models without noise; (b) time of each method on different models with Gaussian noise
Fig. 6. Error comparison line chart of registration results. (a) Error of each method on different models without noise; (b) error of each method on different models with Gaussian noise
| ||||||||||||||||||||
Table 1. Comparison of registration results of four algorithms without noise
| ||||||||||||||||||||
Table 2. Comparison of registration results of four algorithms with Gaussian noise

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20