
Chongyue Bai, Jianjun Wang, Xiaoxiao Cheng, Xuhui Li, Jiongyu Wang, Guangbin Wang, Guangtao Wang. Spatial Positioning Optimization of Driverless Wheelchair by Fusion of Laser SLAM[J]. Laser & Optoelectronics Progress, 2022, 59(2): 0228007
- Laser & Optoelectronics Progress
- Vol. 59, Issue 2, 0228007 (2022)
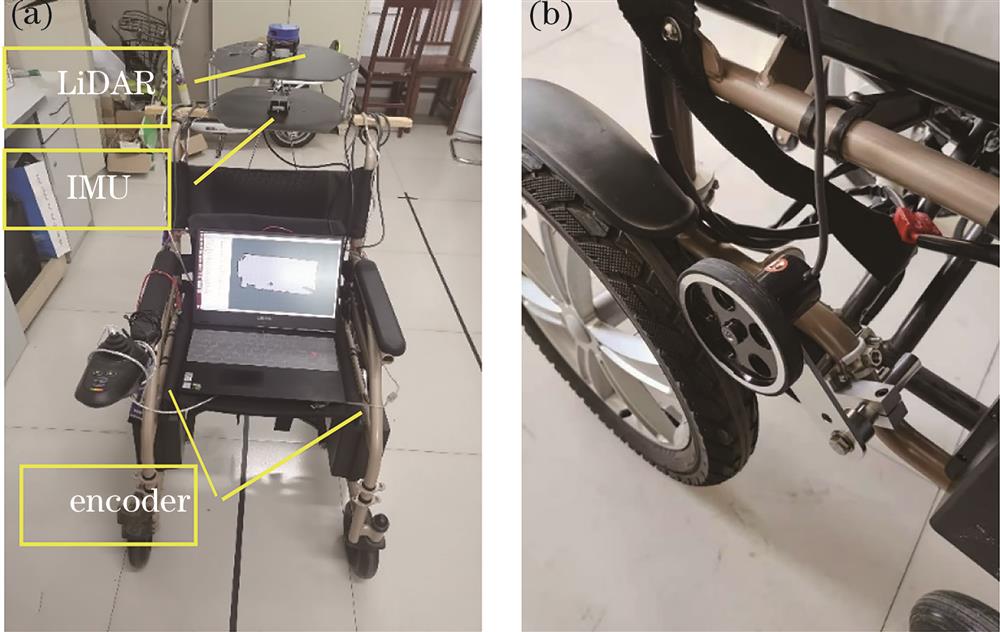
Fig. 1. Experiment platform of driverless wheelchair. (a) General structure drawing; (b) encoder wheel odometer
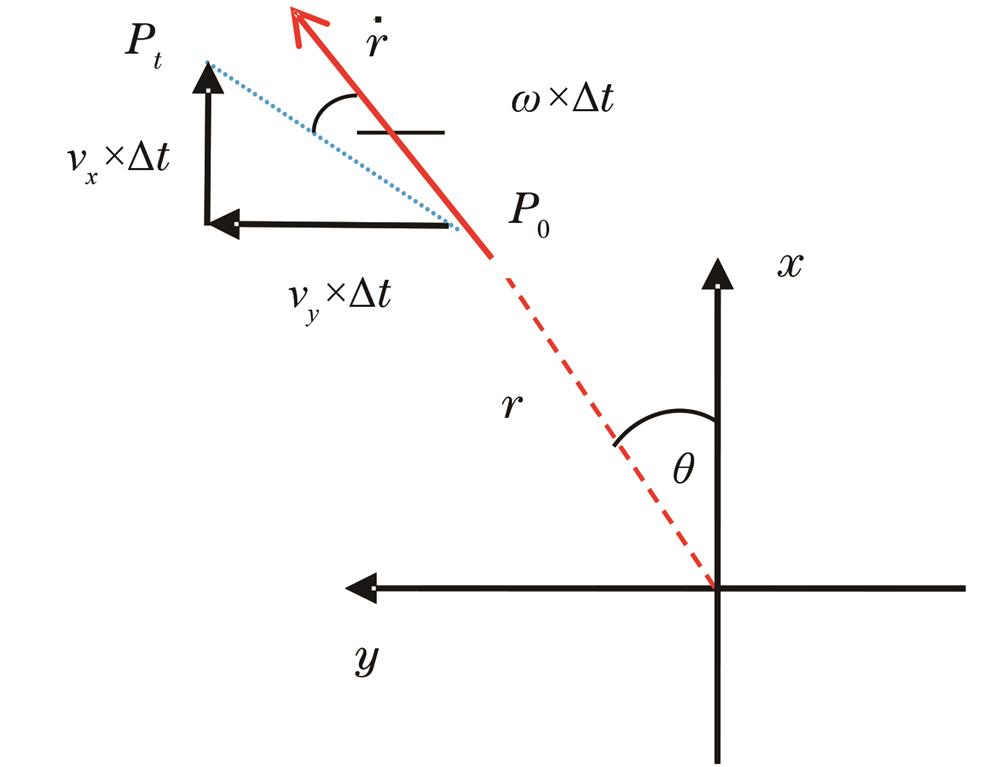
Fig. 2. Schematic diagram of laser odometer
Fig. 3. Trajectory comparison of PLICP and RF2O algorithms. (a) Simulation environment; (b) trajectory
Fig. 4. Schematic diagram of dual odometer positioning
Fig. 5. Process chart of multi-sensor fusion location
Fig. 6. Two kinds of experimental environment. (a) Without slope; (b) with slope
Fig. 7. Comparison of predicted trajectory between DEKF fusion algorithm, encoder odometer and actual trajectory.(a) Without slope; (b) with slope
Fig. 8. Location error. (a) Without slope; (b) with slope
|
Table 1. Experimental parameters

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20