
Wang Yanglang, Wang Kewei, Zou Bin. LiDAR Real-Time Detection of Tunnel Centerline Based on Particle Swarm Optimization Algorithm[J]. Laser & Optoelectronics Progress, 2021, 58(3): 3280041
- Laser & Optoelectronics Progress
- Vol. 58, Issue 3, 3280041 (2021)
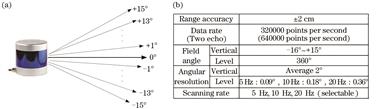
Fig. 1. Basic parameters and basic principles of LiDAR. (a) Schematic diagram of laser emission; (b)basic parameters

Fig. 2. LiDAR installation schematic. (a) Front view; (b) side view
Fig. 3. Vehicle and LiDAR coordinate systems
Fig. 4. Cloud diagram of the vehicle turning to the right to the tunnel point
Fig. 5. Point cloud in the longitudinal reference direction of the tunnel. (a) Two-dimensional schematic diagram of point cloud; (b) three-dimensional schematic diagram of point cloud; (c) LiDAR point cloud with vertical field angle of 1°; (d) point cloud in the longitudinal reference direction of the tunnel
Fig. 6. Particle group algorithm flow diagram
Fig. 7. Top view of point cloud coordinate conversion of tunnel wall. (a) Original point cloud; (b) post-conversion point cloud; (c) comparison chart
Fig. 8. Tunnel cross-section point cloud
Fig. 9. Fitting effect diagrams. (a) Particle swarm optimization algorithm; (b) least squares method (circle); (c) least squares method (ellipse)
Fig. 10. LiDAR installation diagram. (a) Front view; (b) side view
Fig. 11. Point cloud of cross section of tunnel
Fig. 12. Test results. (a) Original point cloud; (b) converted point cloud; (c) center point of tunnel cross section; (d) fitting result of tunnel centerline
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Comparison of detection deviation and actual value of each algorithm
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Difference between measured tunnel center and design center

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20