
Fang Zhong, Wei Hu, Peining Zhu, Han Wang, Chao Ma, Nan Lin, Zuyong Wang. Piezoresistive design for electronic skin: from fundamental to emerging applications[J]. Opto-Electronic Advances, 2022, 5(8): 210029
- Opto-Electronic Advances
- Vol. 5, Issue 8, 210029 (2022)
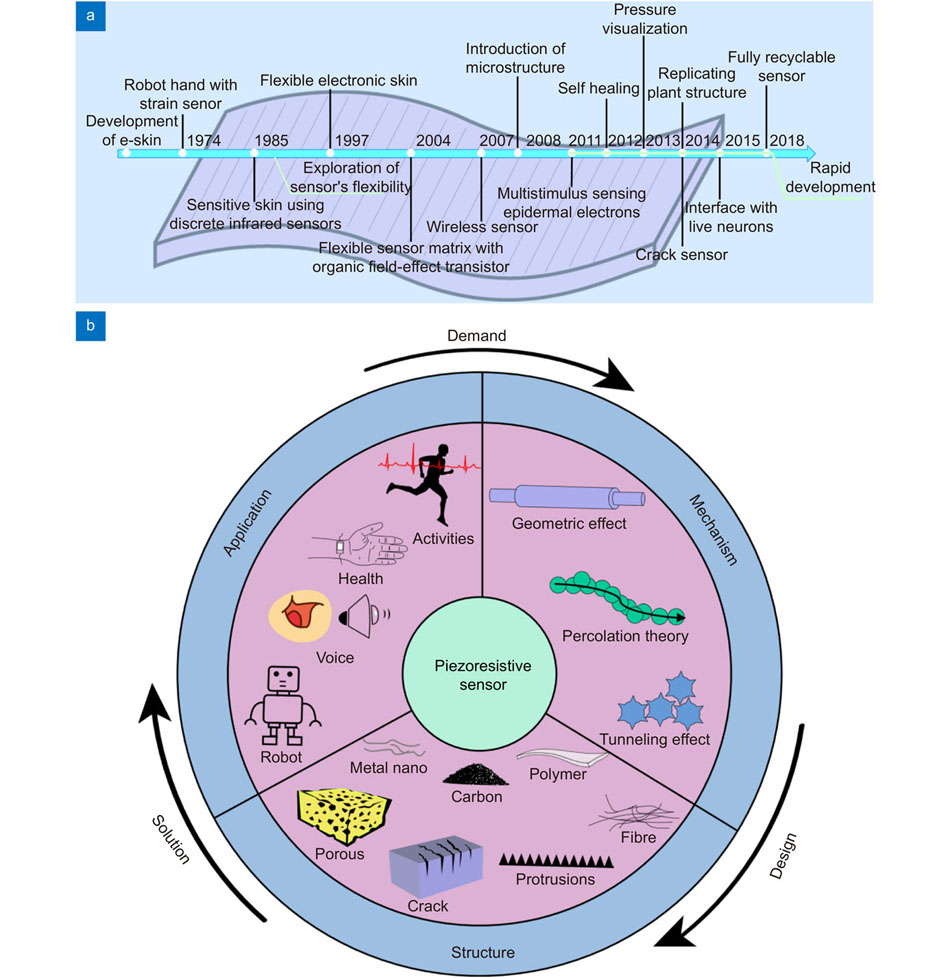
Fig. 1. Piezoresistive designs for engineering electronic skin. (a ) Developmental history of flexible skin-like electronics (e.g. milestones in the shear force measurement, large-area manufacturing, spatial mapping, bioinspired manufacturing, interconnection between e-skin and live neurons, and self-healing capability)10-17 . (b ) Scheme illustrating the design and applications of piezoresistive sensors.
![Principles of piezoresistive effect. (a) Piezoresistance based on the geometric changes of metals and conducting polymers. i and ii represent the block and planar material geometries, respectively41,47. (b) Piezoresistance of semiconductor. Scheme illustrating the changes of charge carrier and energy band upon traction along the [111] direction in p–Si47. (c) Piezoresistance of composite materials based on the changes of conducting filler concentration and inter-filler distance48. (d) Structural piezoresistance based on the contact area and point changes of conducting architecture. Figure reproduced with permission from: (b) ref.47, Elsevier.](/richHtml/OEA/2022/5/8/210029/5_oea-2021-0029-Wangzuyong-2.jpg)
Fig. 2. Principles of piezoresistive effect. (a ) Piezoresistance based on the geometric changes of metals and conducting polymers. i and ii represent the block and planar material geometries, respectively41,47. (b ) Piezoresistance of semiconductor. Scheme illustrating the changes of charge carrier and energy band upon traction along the [111] direction in p–Si47. (c ) Piezoresistance of composite materials based on the changes of conducting filler concentration and inter-filler distance48. (d ) Structural piezoresistance based on the contact area and point changes of conducting architecture. Figure reproduced with permission from: (b) ref.47, Elsevier.
Fig. 3. Development of piezoresistive sensors based on various materials. (a ) Fabrication scheme and optical images of a hybrid metallic foam46. (b ) Schematic illustrating the fabrication of CNTs/FKM nanocomposite50. FKM, fluoroelastomer; CNTs, carbon nanotubes; and TAIC, 1,3,5-triallyl-1,3,5-triazine-2,4,6 (1H,3H,5H)-trione. (c ) Scheme illustrating the assembly of a MG/PU piezoresistive sensor51. MG, modified-graphite; PU, polyurethane; and PDMS, polydimethylsiloxane. (d ) A flexible tactile sensor assembled from the 8x8 array of Si-strain gauges and the Si thin film transistors64. (e ) Scheme illustrating the sandwich-structure of a PEDOT:PSS/Ag NW/PDMS component film74. PEDOT:PSS, poly(3,4-ethylenedioxythiophene):poly(styrenesulfonate); and Ag NWs: Ag nanowires. (f) mGN fillers form new conducting paths under pressure80. mGN, magnetic reduced graphene oxide@nickel nanowire. Figure reproduced with permission from: (a) ref.46, (f) ref.80, American Chemical Society; (c) ref.51, under a Creative Commons Attribution 4.0 International License; (d) ref.64, AIP Publishing.
Fig. 4. Piezoresistive design and manufacture with singular structure. (a ) Piezoresistance of an artificial structured sensor based on contact area changes91. ITO, indium tin oxide; PET, polyethylene terephthalate; SWCNTs, single-walled carbon nanotube; PDMS, polydimethylsiloxane. (b ) Scheme illustrating the lotus-leaf-inspired piezoresistive design and assembly98. (c ) Scheme illustrating the rose-petal-inspired piezoresistive design and assembly99 and the shark-skin-inspired piezoresistive design and assembly101. (d ) Scheme illustrating the spider-leg-joint-inspired piezoresistive design with plenty of cracks102. Figure reproduced with permission from: (a) ref.91, (d) ref.102, Elsevier; (c) ref.101, Elsevier and ref.99, Royal Society of Chemistry.
Fig. 5. Sensitivities of different microstructure sensors. ITO, indium tin oxide; MWNT, multiwalled carbon nanotubes; and PDMS, polydimethylsiloxane. Figure reproduced with permission from ref.94, under a Creative Commons Attribution 4.0 International License.
Fig. 6. Piezoresistive design and manufacture with hierarchical structure. (a ) Multiple dome structures as piezoresistance sensing layer86. (b ) Multiple structure comprising of dense protuberances and porous structure as piezoresistance sensing layer106. HPM, hybrid porous microstructure; and CNT, carbon nanotubes. (c ) Piezoresistive sensitivities based on the sensing layers comprising of rough-to-rough, rough-to-flat and flat-to-rough surfaces107. Figure reproduced with permission from: (a) ref.86, (b) ref.106, (c) ref.107, American Chemical Society.
Fig. 7. Design and manufacture of fibre piezoresistive sensor. (a ) Schematic of a rGO-Ag NW@cotton fibre, through immersion of cotton fibres in a reductive solution containing GO and AgNW112. GO, graphene oxide; rGO, reduced GO; and AgNW, Ag nanowires. (b ) Scheme of an electrospun fibre piezoresistive sensor and its sensing mechanisms during pressure and blending110. KL, kraft lignin. (c ) Scheme of a wet-spinning single-fibre piezoresistive sensor122. Figure reproduced with permission from: (a) ref.110, (b) ref.112, Elsevier; (c) ref.122, American Chemical Society.
Fig. 8. Piezoresistive design and manufacture with spongy structure. (a ) Freeze drying for the fabrication of piezoresistive sponge68. (b ) Directional freeze drying of the fabrication of piezoresistive wave-shaped sensing layers127. CNC, cellulose nanocrystals. (c ) Dip coating of as-fabricated sponge with conducting materials130. PU, polyurethane; and MWCNT, multiwalled carbon nanotubes. (d ) Sacrificial template for the fabrication of piezoresistive sponge131. (e ) Sponge-based hierarchical structure (e.g. cracks) for piezoresistive sensor134. Figure reproduced with permission from: (a) ref.68, (d) ref.131, (e) ref.134, American Chemical Society; (b) ref.127, (c) ref.130, Royal Society of Chemistry.
Fig. 9. Additive manufacturing for piezoresistive sensor. (a ) Drop-on-demand material jetting for the facial fabrication of piezoresistive structures143. MCF, milled carbon fibers; and SR, silicone rubber. (b ) 3D printing of human-skin-inspired texture as piezoresistive sensing layers144. CNT, carbon nanotube. (c ) Application of a 3D printed piezoresistive sensor for robotic fingertips to sense force145. (d ) 3D printing of conducting composite for piezoresistive sensor148. SIS, polystyrene–polyisoprene–polystyrene. (e , f ) 3D printing of different structure parameters (e.g. diameter, interaxial angle, and interlayer space) for piezoresistive sensor149. GF, gauge factor. Figure reproduced with permission from: (a) ref.143, (e, f) ref.149, Elsevier; (c) ref.145, American Chemical Society; (d) ref.148, Royal Society of Chemistry.
Fig. 10. Piezoresistive sensor for health monitoring. (a ) Detection of physical activities by piezoresistive sensor, including the swallowing (A and B: the pharyngeal and esophageal phase, respectively) and the posture of human back152. (b ) Detection of physiological activities (e.g. wrist and jugular venous pulse) at high sensitivities153. (c ) Detection of myocardic activities (e.g. heartbeats at breathing and not breathing) by a piezoresistive sensor154. (d ) Identification of different mechanical stimuli, including pressure, shear and torsion force132. Figure reproduced with permission from: (a) ref.152, (d) ref.132, Elsevier; (b) ref.153, (c) ref.154, American Chemical Society.
Fig. 11. Piezoresistive sensor for intelligent healthcare. (a ) Piezoresistance for visiual, alarm, wireless and implanted applications35. (b ) Triode-mimicking pressure sensor for intelligent shoe pad159. (c ) Scheme illustrating a monitoring system developed based on the intelligent shoe pad in (b)159. (d ) Continuous and multiple signals from the integrated gait monitoring system in (c)159. Figure reproduced with permission from: (a) ref.35; (b–d) ref.159, American Chemical Society.
Fig. 12. Piezoresistive sensor for intelligent speech recognition. (a ) Piezoresistive detection of sound (e.g. word recognition, volume detection, and voice recognition)68. (b ) Response of a MXene-based piezoresistive sensor to the audio outputs at different volumes162. (c ) Anti-interference voice recognition by a skin-attachable piezoresistive sensor165. Figure reproduced with permission from: (a) ref.68, (b) ref.162, (c) ref.165, American Chemical Society.
Fig. 13. Piezoresistive sensor for prosthetics and robots. (a ) Manipulating the robot arm by a piezoresistive sensor for music playing169. (b ) Large-area force distribution detected by fibre piezoresistive sensor array171. (c ) Piezoresistive sensor for the real-time monitoring of robot−tissue collision/interaction in surgical robots173. (d ) Development of an artificial afferent nerve based on multiple piezoresistive sensors175. Figure reproduced with permission from: (a) ref.169, (b) ref.171, (c) ref.173, American Chemical Society.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Summary on the parameters of current piezoresistive sensors.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20