
Yuhao Wang, Zetian Tang, Minzhe Zhong, Yang Wang, Guangwen Zhao, Caifu Ding, Chen Yang. Image Matching Algorithm for Fast Scale-Invariant Feature Transformation Based on Mask Search[J]. Laser & Optoelectronics Progress, 2021, 58(4): 0410010
- Laser & Optoelectronics Progress
- Vol. 58, Issue 4, 0410010 (2021)
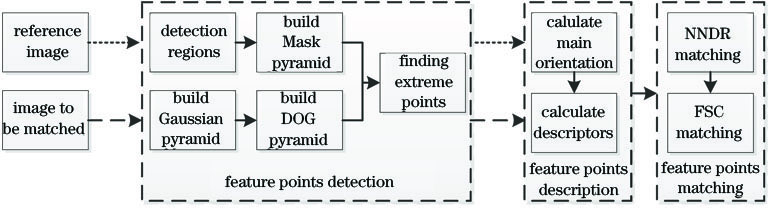
Fig. 1. Flowchart of proposed algorithm
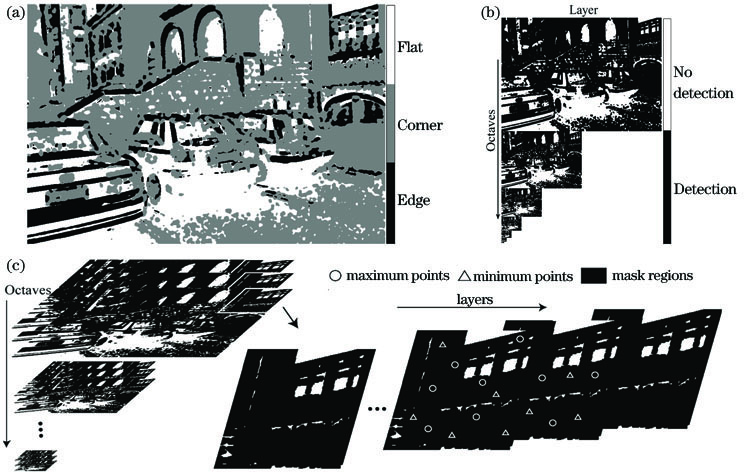
Fig. 2. Image partition, Mask pyramid, and feature point searching with Mask. (a) Image partition; (b) Mask pyramid; (c) feature point searching with Mask
Fig. 3. Matching time, correct matching points, and seven-zone circular descriptor. (a) Matching time; (b) correct matching points; (c) seven-zone circular descriptor
Fig. 4. Image matching results. (a) Brightness transformation; (b) perspective transformation; (c) fuzzy transformation; (d) rotation and scaling transformation; (e) compression transformation
Fig. 5. Overall time of algorithm, number of feature points, and number of correct matching points. (a) Overall time of algorithm; (b) number of feature points; (c) number of correct matching points
Fig. 6. Descriptor generation time, matching time, and number of correct matching points. (a) Descriptor generation time; (b) matching time; (c) number of correct matching points
Fig. 7. Algorithms for adding extreme category in matching stage. (a) SIFT algorithm; (b) algorithm in Ref. [10]; (c) algorithm in Ref. [11]
|
Table 1. Running time of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20