In the high-precision-long-stroke manufacturing system, precise servo control of a motor determines the machining accuracy during manufacturing. Moreover, the value of the motor subposition is an important signal in the motor feedback control system, which determines the control precision of the linear motor servo system. Therefore, analyzing the position measurement algorithm for a high-precision-long-stroke linear electric motor is crucial. Currently, the linear electromotor measurement based on a digital image is mostly a short-stroke measurement and cannot achieve long-stroke precision measurement. However, with the continuous improvement of precision manufacturing requirements, the need for the accurate measurement of the displacement of long-stroke linear electric motor becomes extremely urgent. Moreover, unlike the two-frame image measurement system in short-stroke measurement, long-stroke measurement comprises a multi-frame image measurement system. The number of frames increases as the measurement distance increases, resulting in problems related to error accumulation. The cumulative measurement error is the most important factor that affects the measurement accuracy of rectilinear distance displacement. Hence, to address the issue of error accumulation owing to the displacement superposition of multiple frames during the measurement of the linear electromotor subposition, an error reduction algorithm based on machine vision with a threshold transform reference map was proposed herein.
In this study, the phase correlation algorithm is used to obtain the whole pixel offset between two frames rapidly, and the corresponding distance of the registration image is translated to decrease the displacement deviation between the registration image and reference frame to <1 pixel. The gray gradient algorithm is used to measure the subpixel displacement of the translated image in a small range. To improve the measurement accuracy and range of adjacent frames, then, the reference map is set, and the displacement images at different moments are registered to obtain the displacement value at specific moments. When the displacement between the registration map and reference map exceeds the maximum measured displacement between two frames, the transformation threshold is set to dynamically adjust the reference map. Based on the number of threshold transformations, the dynamic–real-time position is obtained using displacement superposition. Compared with the method of stacking adjacent frame displacements to obtain long-stroke displacement values, the proposed method can effectively reduce the displacement stacking time and cumulative error.
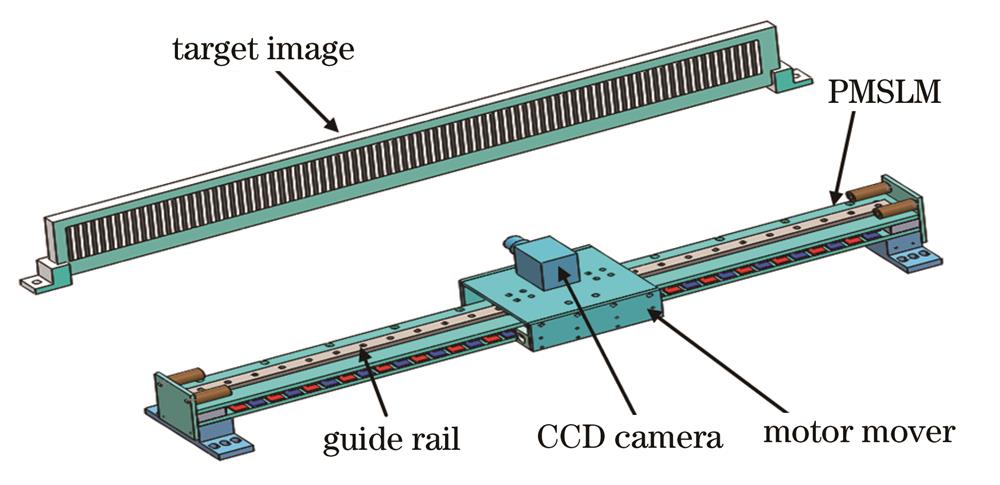
First, a one-dimensional image measurement system is designed based on the one-dimensional rigid body translation of the linear motor, and one-dimensional target images are generated and optimized to improve the accuracy of the measurement system, as shown in Figs. (1) and (3). The measurement range of the adjacent frame image measurement algorithm is optimized, and the measuring distance of displacement between two frames is extended, which lays a foundation for reducing the cumulative error. As shown in Fig. (6), the measurement range of the improved algorithm increases from 1 pixel to 189.54 pixel. Finally, the cumulative error reduction approach for a self-adjusting reference graph is proposed, which can reduce the cumulative error by ensuring high-resolution feedback from all positions through the changes in the reference graph, as seen in Fig. (7). The feasibility of the proposed method is verified via the experimental data in Figs. (10), (11), and (12). Fig. (11) verifies the feasibility of the proposed method, and demonstrates that its measurement accuracy is higher than the other methods. Fig. (12) verifies the robustness of the proposed method, which maintains a high level of measurement accuracy under low illumination conditions.
In this study, by improving the measurement accuracy of adjacent frames and decreasing the cumulative error, the long-stroke measurement of linear electromotor displacement with high precision is realized. First, image registration is divided into two parts: whole pixel translation and subpixel high-precision measurement. The accuracy and range of the algorithm in adjacent frame displacement image measurements are improved via step calculation. Then, to reduce the cumulative error in the displacement measurement process of long-stroke electromotor subunits, a threshold transform reference graph is added to reduce the cumulative times of displacement. The feasibility and effectiveness of the proposed method were verified via simulation and platform experiments. Experimental results show that compared with the traditional algorithm, the proposed method can effectively reduce the cumulative error by >80% and exhibit better cumulative error reduction under different illumination conditions. Therefore, the algorithm proposed herein can effectively reduce the cumulative error in the long-stroke measurement, which is conducive to the realization of high-precision measurement of the long-stroke linear electromotor displacement.