
Miao LI, Zai-Ping LIN, Jian-Peng FAN, Wei-Dong SHENG, Jun LI, Wei AN, Xin-Lei LI. Point target detection based on deep spatial-temporal convolution neural network[J]. Journal of Infrared and Millimeter Waves, 2021, 40(1): 122
- Journal of Infrared and Millimeter Waves
- Vol. 40, Issue 1, 122 (2021)
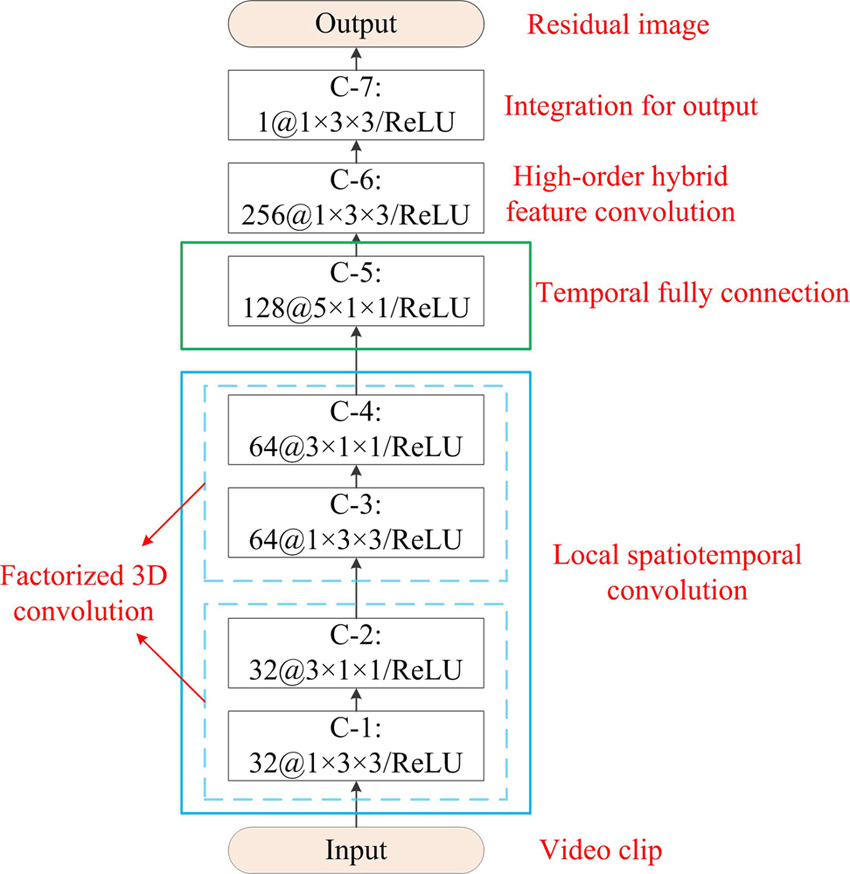
Fig. 1. The proposed network architecture.
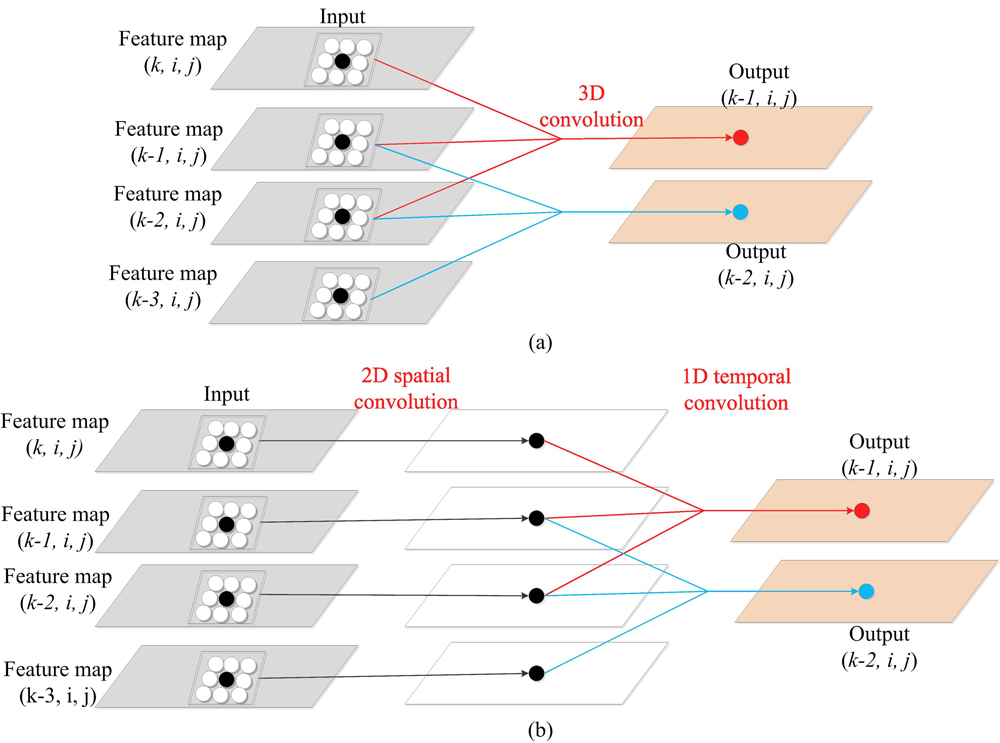
Fig. 2. The sketches of 3D covolution and factorized 3D convolution: (a) 3D covolution; (b) factorized 3D convolution.
Fig. 3. The example of different error distributions: (a) the ground truth; (b) 1th predicted result with uniform error; (c) 2th predicted result with concentrated error.
Fig. 4. The function of intensity weighting parameter.
Fig. 5. The example of samples: (a) the target samples; (b) the background samples.
Fig. 6. The original image and results of different methods for 1th Background.: (a) the original input; (b) the result of our method; (c) the result of Lin’s method; (d) the result of Max-Mean; (e) the result of TopHat; (f) the result of STDA.
Fig. 7. The original image and results of different methods for 2th Background.: (a) the original input; (b) the result of our method; (c) the result of Lin’s method; (d) the result of Max-Mean; (e) the result of TopHat; (f) the result of STDA.
Fig. 8. The original image and results of different methods for Target 1: (a) the original input; (b) the result of our method; (c) the result of Lin’s method; (d) the result of Max-Mean; (e) the result of TopHat; (f) the result of STDA.
Fig. 9. The original image and results of different methods for Target 2: (a) the original input; (b) the result of our method; (c) the result of Lin’s method; (d) the result of Max-Mean; (e) the result of TopHat; (f) the result of STDA.
Fig. 10. The display of Target 2: (a) the original gray image; (b) the standard deviation in the time domain.
Fig. 11. The ROC curves of different methods.
Fig. 12. The result of different input size: (a) the input image with 35×35 pixels; (b) the result of image with35×35 pixels; (c) the input image with 45×45 pixels; (b) the result of image with45×45 pixels.
Fig. 13. The ROC curves with different jitters.
Fig. 14. The ROC curves with different mean original SCRs.
|
Table 1. Computation comparison of different convolutions.
|
Table 2. The simulation environment.
|
Table 3. Background suppression comparison by SCR in output.
|
Table 4. Background suppression comparison by BSF.
|
Table 5. Average runtime comparison.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20