
Tao Jiang, Xiaosheng Cheng, Haihua Cui, Wei Tian. Large Field of View Vision Method for Robot Pose Measurement Based on Zoom Lens[J]. Acta Optica Sinica, 2018, 38(8): 0815012
- Acta Optica Sinica
- Vol. 38, Issue 8, 0815012 (2018)
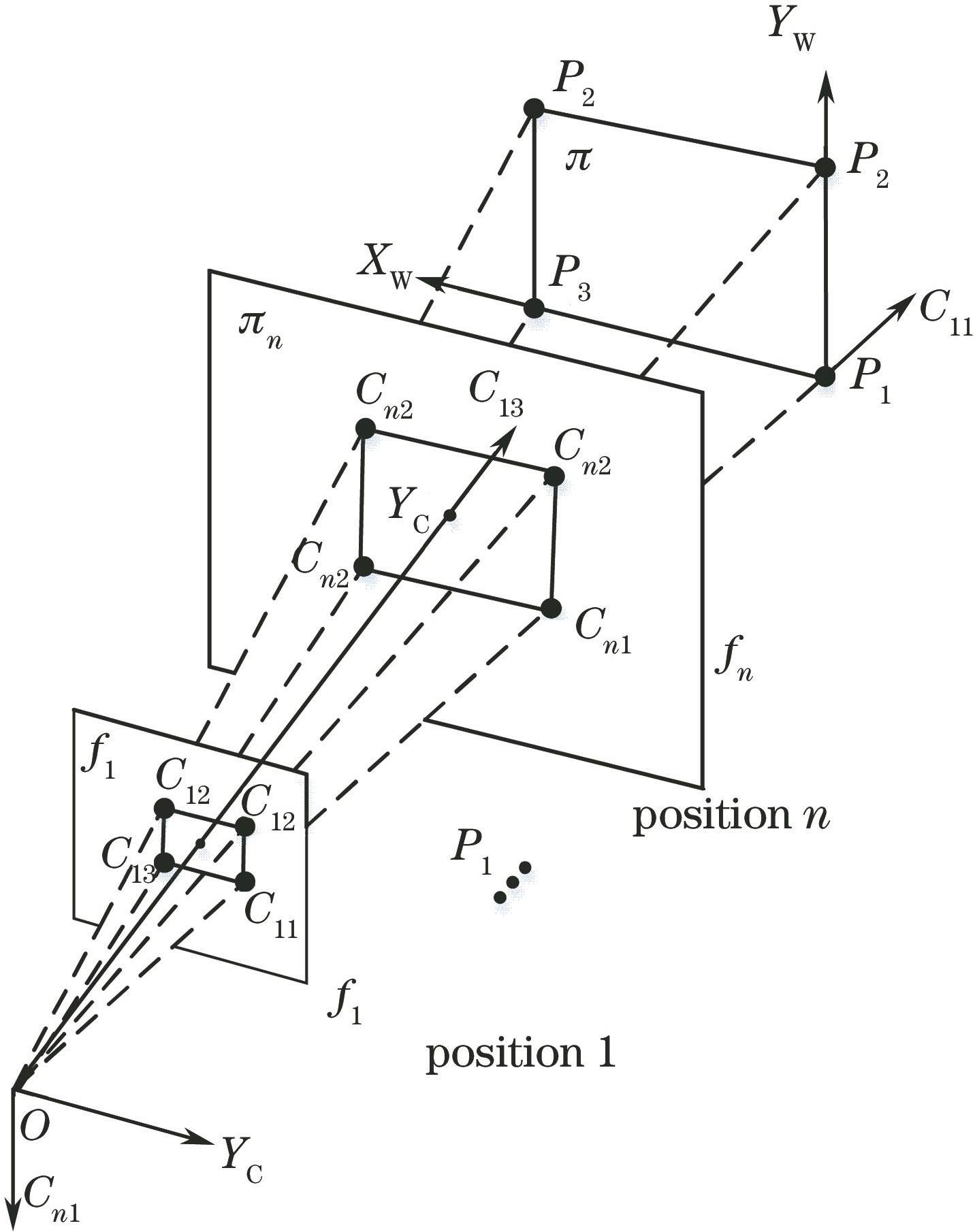
Fig. 1. Zoom lens model
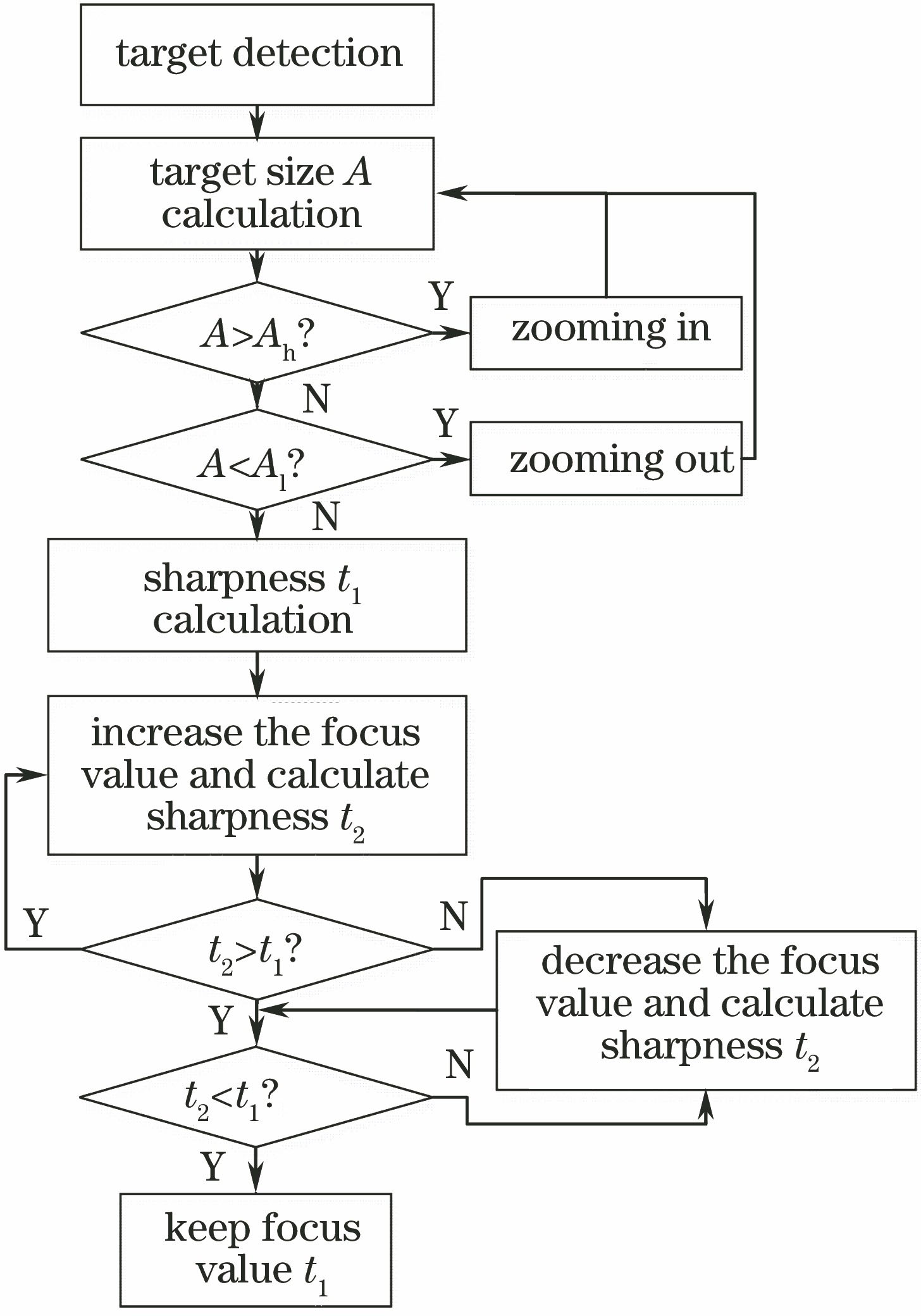
Fig. 2. Flow chart of zoom control strategy
Fig. 3. Planar target board
Fig. 4. Superposition of target and template images. (a) IC; (b) IA; (c) ID1; (d) IC; (e) IB; (f) ID2
Fig. 5. Examples of target detection
Fig. 6. Mean error of single point pose. (a) Mean position error of zoom 10; (b) mean orientation error of zoom 10; (c) mean position error of zoom 60; (d) mean orientation error of zoom 60
Fig. 7. Line position measurement. (a) Data of line measurement with zoom lens; (b) depth error distribution and united camera coordinate system
Fig. 8. Robot pose measurement experiment. (a) Schematic of system; (b) experiment setup
Fig. 9. Experiment of robot's pose precision. (a) Tracking path with zoom lens; (b) tracking path with C-Track; (c) tracking error comparison
Fig. 10. Large range zoom tracking experiments. (a) Linear motion in depth direction; (b) complex space motion
|
Table 1. Root mean square error of single point measurement

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20