
Shuangwu Chai, Xiaoqin Yang. Line Primitive Point Cloud Registration Method Based on Dual Quaternion[J]. Acta Optica Sinica, 2019, 39(12): 1228006
- Acta Optica Sinica
- Vol. 39, Issue 12, 1228006 (2019)
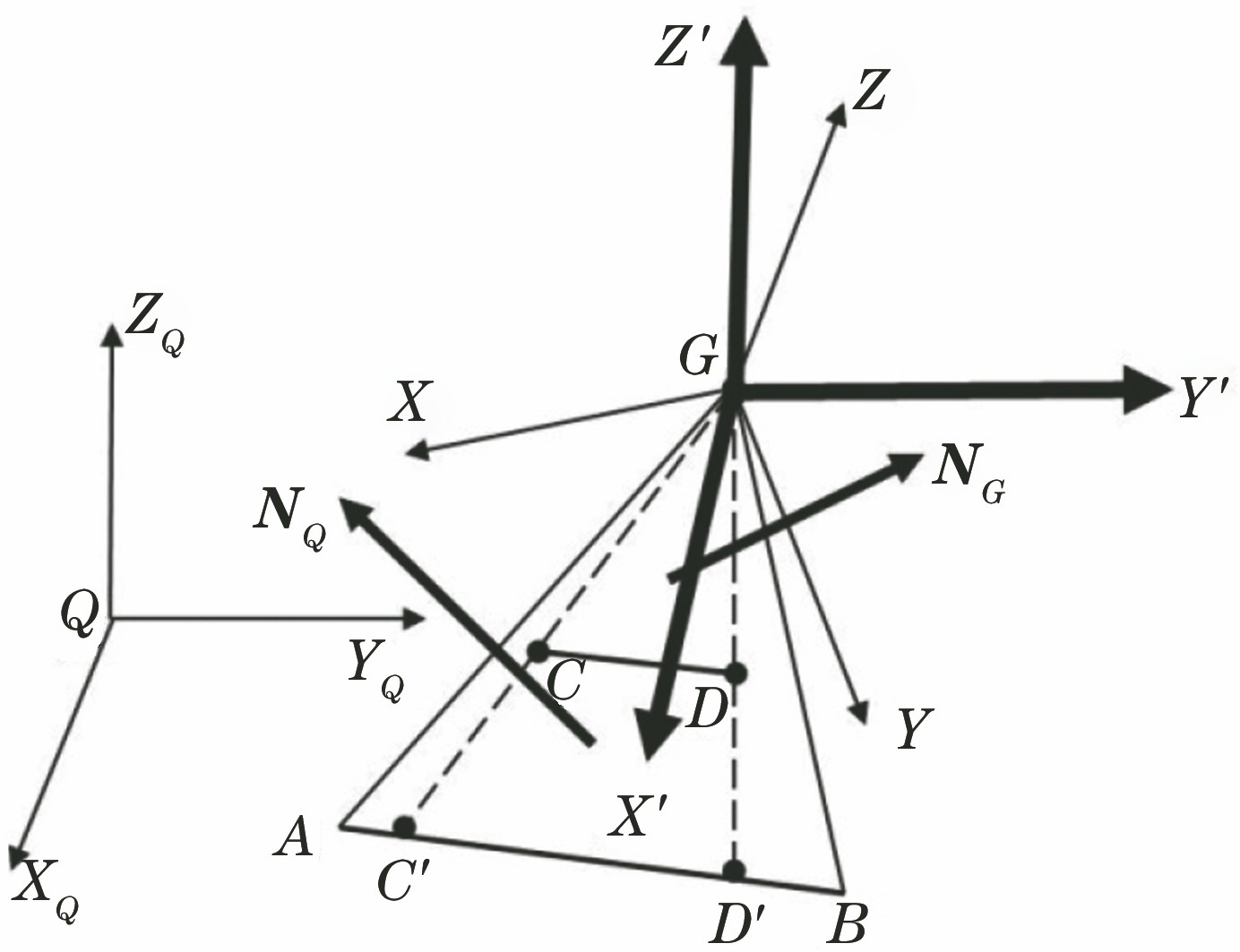
Fig. 1. Diagram of point cloud registration

Fig. 2. Simplified diagram of point cloud registration
Fig. 3. Flowchart of point cloud registration algorithm
Fig. 4. Point cloud data. (a) Unregistrated station; (b) reference station
Fig. 5. Spatial distributions of homonymous lines. (a) Before registration; (b) after registration
Fig. 6. Visual effects of proposed method. (a) Before registration; (b) after registration
Fig. 7. Visual effects after registration. (a) Method in Ref. [12]; (b) method in Ref. [16]
|
Table 1. Comparison of results and time consumption of different methods
|
Table 2. Comparison of medium errors of unit vector and moment vector deviations of homonymous lines calculated by different methods after registration

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20