
Tianfeng Feng, Changliang Ren, Qin Feng, Maolin Luo, Xiaogang Qiang, Jing-Ling Chen, Xiaoqi Zhou. Steering paradox for Einstein–Podolsky–Rosen argument and its extended inequality[J]. Photonics Research, 2021, 9(6): 992
- Photonics Research
- Vol. 9, Issue 6, 992 (2021)
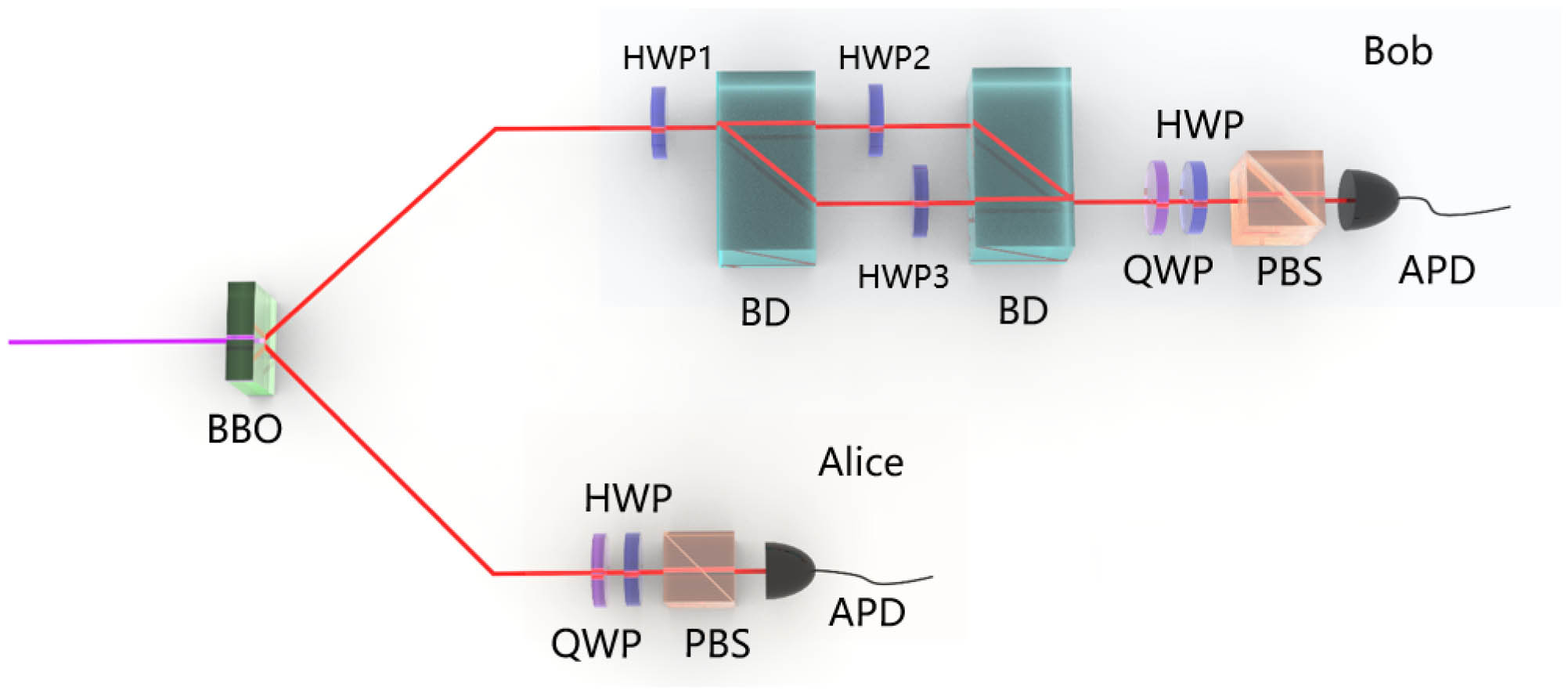
Fig. 1. Experimental setup. Polarization-entangled photons pairs are generated via nonlinear crystal. An asymmetric loss interferometer along with half-wave plates (HWPs) is used to prepare two-qubit pure entangled states. The projective measurements are performed using wave plates and polarization beam splitter (PBS).
![Experimental results for pure states. (a) Experimental results concerning the steering paradox “2=1.” The black and blue solid lines represent the quantum prediction S≡PtotalQM=2 and the classical bound C=1 based on the LHV models, respectively. The black cubes and the red lines show the experimental results with error bar. (b) Experimental results for the three-setting GLSI (7). The black and blue solid lines represent the quantum and classic bounds, respectively, which are obtained by maximizing the difference between S3′ and CLHS′ for any fixed α. The black (blue) dot line represents the quantum violation ⟨S3′′⟩=1+2 sin 2α (classical value C=3) of the usual three-setting LSI (8). The red cubes are the experimental points for the inequality (7). The light yellow range is α∈(0,(arcsin3−12)/2], where the LSI (8) cannot detect the steerability but the GLSI can. (c) Experimental violation for α=π36,π18.](/richHtml/prj/2021/9/6/06000992/img_002.jpg)
Fig. 2. Experimental results for pure states. (a) Experimental results concerning the steering paradox “2 = 1 S ≡ P total QM = 2 C = 1 7 ). The black and blue solid lines represent the quantum and classic bounds, respectively, which are obtained by maximizing the difference between S 3 ′ C LHS ′ α ⟨ S 3 ′ ′ ⟩ = 1 + 2 sin 2 α C = 3 8 ). The red cubes are the experimental points for the inequality (7 ). The light yellow range is α ∈ ( 0 , ( arcsin 3 − 1 2 ) / 2 ] 8 ) cannot detect the steerability but the GLSI can. (c) Experimental violation for α = π 36 , π 18
Fig. 3. Experimental results for mixed states. (a), (b) Steering detection for the generalized Werner state ρ 1 ρ 2 7 ), respectively. The black (blue) dots denote results for the quantum states that can (cannot) experimentally violate the GLSI (7 ). The zoom shows the area where steering cannot be detected by usual LSI (8 ), whereas GLSI may be useful.
Fig. 4. Detecting EPR steerability of the generalized Werner state by using the usual three-setting LSI (blue line) and three-setting GLSI (red line). For a fixed parameter α V M in
Fig. 5. Generalized Werner states violate the usual three-setting LSI in the blue region and three-setting generalized LSI in the red region. It can be observed that the GLSI is stronger than the usual LSI in detecting EPR steerability.
Fig. 6. Detecting EPR steerability of the mixed state Eq. (B16 ) by using the usual three-setting LSI (blue line) and three-setting GLSI (red line). For a fixed parameter α V M ax
Fig. 7. Mixed states Eq. (B16 ) violate the usual three-setting LSI in the blue region and three-setting GLSI in the red region. It can be observed that the GLSI is stronger than the usual LSI in detecting EPR steerability.
Fig. 8. Experimental setup and the specific angles for state preparation.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20