
Qishu Qian, Yihua Hu, Nanxiang Zhao, Minle Li, Fucai Shao, Xinyuan Zhang, "Object tracking method based on joint global and local feature descriptor of 3D LIDAR point cloud," Chin. Opt. Lett. 18, 061001 (2020)
- Chinese Optics Letters
- Vol. 18, Issue 6, 061001 (2020)
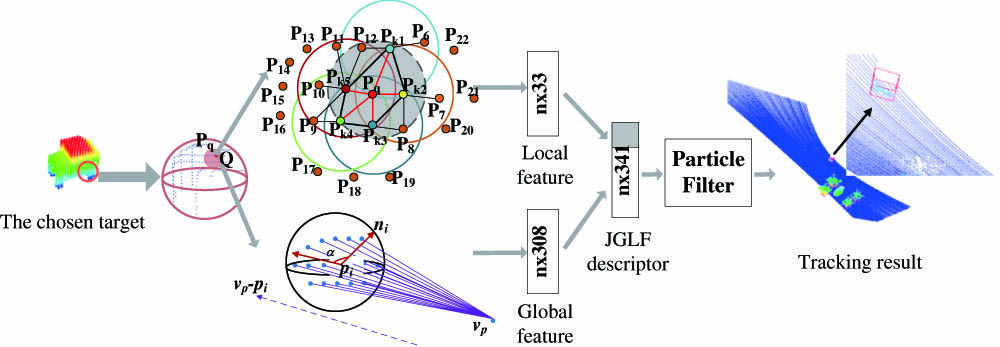
Fig. 1. Proposed object tracking method of point cloud based on JGLF.
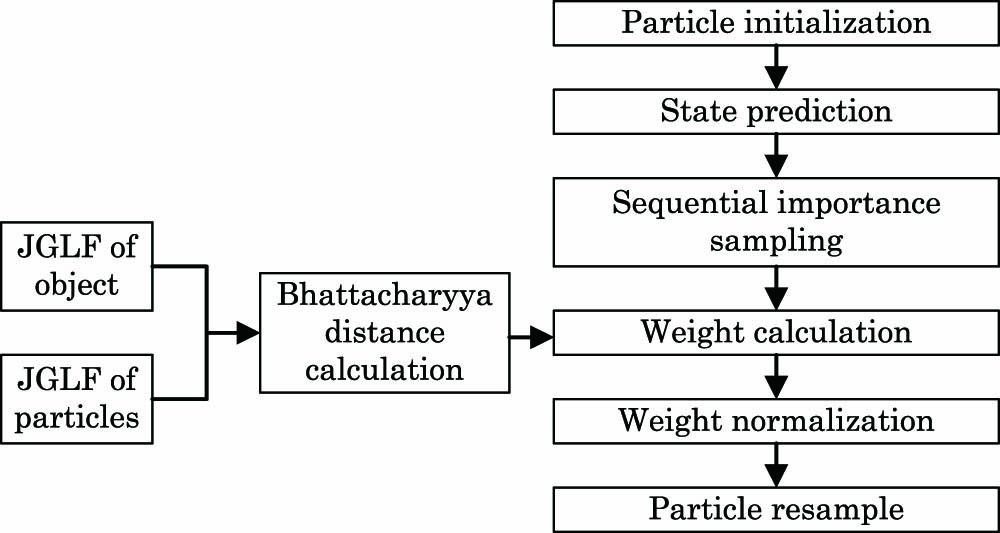
Fig. 2. Flow chart of the proposed object tracking method.
Fig. 3. Comparison of the object recognition rate at different distances between LIDAR and the object.
Fig. 4. Results of the PF point cloud tracking algorithm based on JGLF in frame
Fig. 5. Comparison of the object tracking effect between the two algorithms.
| ||||||||||||||||||||||||||||||
Table 1. Object Recognition Ability Comparison of Six Descriptors
| ||||||||||||||||||||||||||||||||||||||
Table 2. Comparison of Tracking Results of Five Algorithms


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20