
Daniele Ancora, Lorenzo Dominici, Antonio Gianfrate, Paolo Cazzato, Milena De Giorgi, Dario Ballarini, Daniele Sanvitto, Luca Leuzzi. Speckle spatial correlations aiding optical transmission matrix retrieval: the smoothed Gerchberg–Saxton single-iteration algorithm[J]. Photonics Research, 2022, 10(10): 2349
- Photonics Research
- Vol. 10, Issue 10, 2349 (2022)
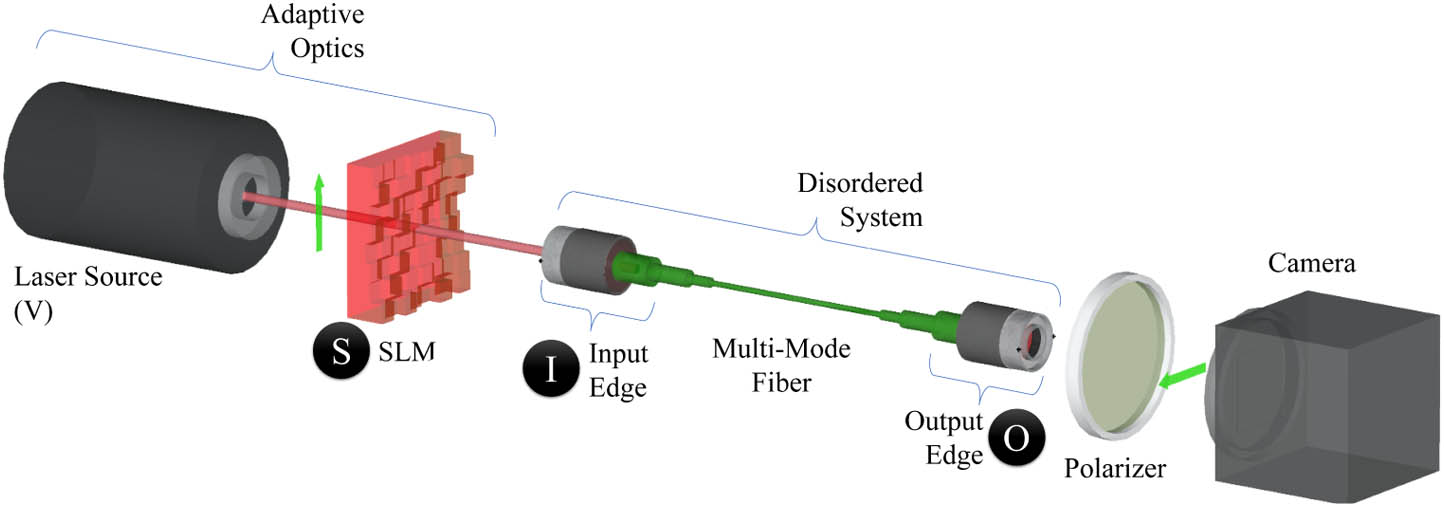
Fig. 1. Scheme of the setup used for our imaging experiments. A laser source (vertical polarization) is modulated into a probing pattern using a spatial light modulator (SLM). Once modulated, the field is projected onto the input edge of a multi-mode fiber (I). The light that trespasses the disordered medium is imaged at the output edge (O) by a standard camera sensor (horizontal polarization).
![Scheme of the Gerchberg–Saxton phase retrieval protocols used in our manuscript. The orange box indicates where the smoothing operation takes place. Without this operation, the phase retrieval protocol is the same as described in Ref. [16].](/richHtml/prj/2022/10/10/2349/img_002.jpg)
Fig. 2. Scheme of the Gerchberg–Saxton phase retrieval protocols used in our manuscript. The orange box indicates where the smoothing operation takes place. Without this operation, the phase retrieval protocol is the same as described in Ref. [16].
Fig. 3. Imaging results for five input symbols obtained after a single iteration using γ = 4
Fig. 4. Comparison of imaging performance of different GS algorithms. (A) Results after a single iteration, (B) after 10 iterations, (C) after 100 iterations, and (D) after 1000 iterations. The error bar represents the standard deviation of the image reconstruction over all the objects to be reconstructed.
Fig. 5. Comparative study on the reconstruction of images at progressively increasing sampling ratios. The block on the top shows the reconstructions after a single iteration. The bottom block shows the same study after 10 iterations. For each block, the first row shows the reconstruction results at various sampling ratios γ
Fig. 6. Difference map for the NRMSE of GS and SmoothGS. Here, we considered a variable number of iterations ∈ [ 1,20 ]
Fig. 7. Study of the reconstruction quality by changing the size of the observation window at the output. Panel (A) shows the study for γ = 2.5 γ = 3.0 γ = 3.5 γ = 4.0 γ γ < 4
Fig. 8. Reconstruction quality as a function of resized output. Panel (A) γ = 2.5 γ = 3.0 γ = 3.5 γ = 4.0 0.4 ×
Fig. 9. Temporal performance of the Gerchberg–Saxton phase retrievals. In panel (A), the average time per iteration is measured by running 10 3 t GS ( t method − t GS ) / t GS E .

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20