
Xu Zhan, Yong Cai. Point Cloud Registration Algorithm Based on Cosine Similarity[J]. Laser & Optoelectronics Progress, 2020, 57(12): 121503
- Laser & Optoelectronics Progress
- Vol. 57, Issue 12, 121503 (2020)
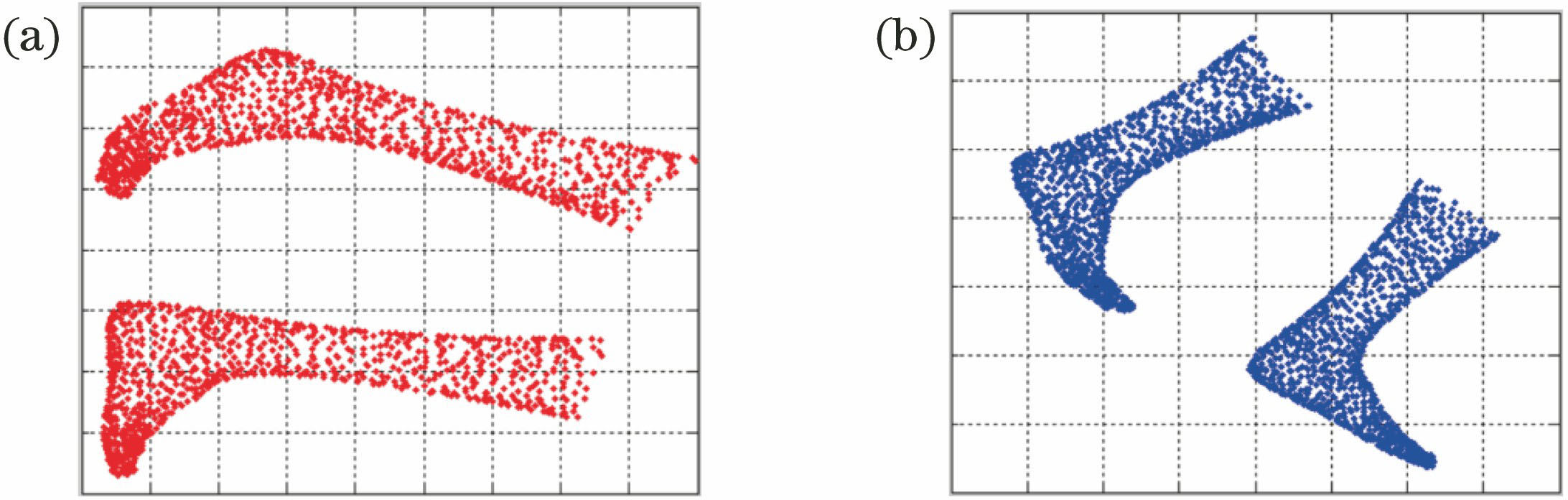
Fig. 1. Point cloud rasterization.(a) Original point cloud rasterization; (b) target point cloud rasterization
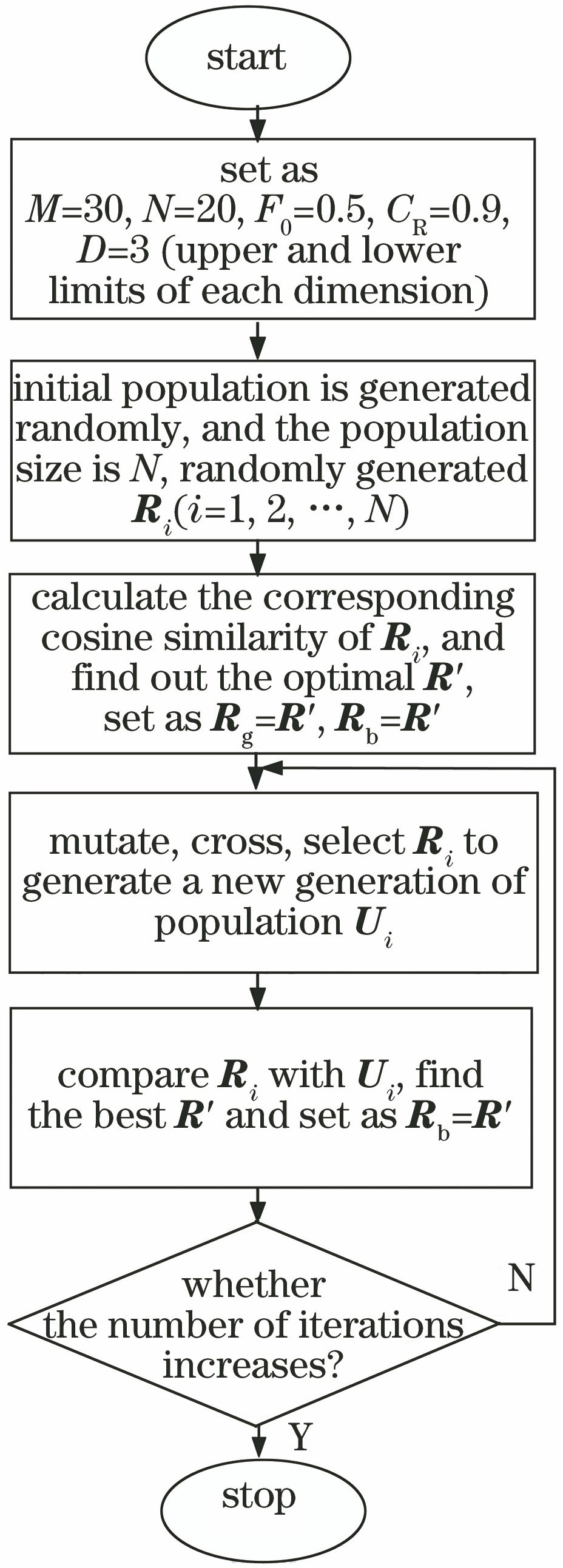
Fig. 2. Search for optimal R flowchart based on DE
Fig. 3. Comparison of registration results of various algorithms in Feet perspective 1. (a) Unregistered results; (b) CPD algorithm; (c) Scale-ICP algorithm; (d) Go-ICP algorithm; (e) proposed algorithm
Fig. 4. Comparison of registration results of various algorithms in Feet perspective 2. (a) Unregistered results; (b) CPD algorithm; (c) Scale-ICP algorithm; (d) Go-ICP algorithm; (e) proposed algorithm
Fig. 5. Comparison of registration results of various algorithms in Cow perspective 1. (a) Unregistered results; (b) CPD algorithm; (c) Scale-ICP algorithm; (d) Go-ICP algorithm; (e) proposed algorithm
Fig. 6. Comparison of registration results of various algorithms in Cow perspective 2. (a) Unregistered results; (b) CPD algorithm; (c) Scale-ICP algorithm; (d) Go-ICP algorithm; (e) proposed algorithm
Fig. 7. Comparison of registration results of various algorithms for adding noise to Feet. (a) Unregistered results; (b) CPD algorithm; (c) Scale-ICP algorithm; (d) Go-ICP algorithm; (e) proposed algorithm
Fig. 8. Comparison of registration results of various algorithms for adding noise to Cow. (a) Unregistered results; (b) CPD algorithm; (c) Scale-ICP algorithm; (d) Go-ICP algorithm; (e) proposed algorithm
Fig. 9. Comparison of registration results of various algorithms for Feet losing 50% data. (a) Unregistered results; (b) CPD algorithm; (c) Scale-ICP algorithm; (d) Go-ICP algorithm; (e) proposed algorithm
Fig. 10. Comparison of registration results of various algorithms for Feet losing 75% data. (a) Unregistered results; (b) CPD algorithm; (c) Scale-ICP algorithm; (d) Go-ICP algorithm; (e) proposed algorithm
Fig. 11. Comparison of registration results of various algorithms for Cow losing 50% data. (a) Unregistered results; (b) CPD algorithm; (c) Scale-ICP algorithm; (d) Go-ICP algorithm; (e) proposed algorithm
Fig. 12. Comparison of registration results of various algorithms for Cow losing 75% data. (a) Unregistered results; (b) CPD algorithm; (c) Scale-ICP algorithm; (d) Go-ICP algorithm; (e) proposed algorithm
| |||||||||||||||||||||||||||||||||||
Table 1. Comparison of MSE results of different models from different views
| |||||||||||||||||||||||||||||||||||
Table 2. Comparison of running time of different models from different views
| |||||||||||||||||||
Table 3. Comparison of MSE results of interference signal added by different models
| |||||||||||||||||||||||||||||||||||
Table 4. Comparison of MSE results of different models with different sizes of missing data

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20