
Sheng Lu, Jungang Han, Lianzhe Wang, Haipeng Tang, Quan Qi, Ningyu Feng, Shaojie Tang. Research on Two-Stage Variable Scale Three-Dimensional Point Cloud Registration Algorithm[J]. Laser & Optoelectronics Progress, 2020, 57(20): 201503
- Laser & Optoelectronics Progress
- Vol. 57, Issue 20, 201503 (2020)
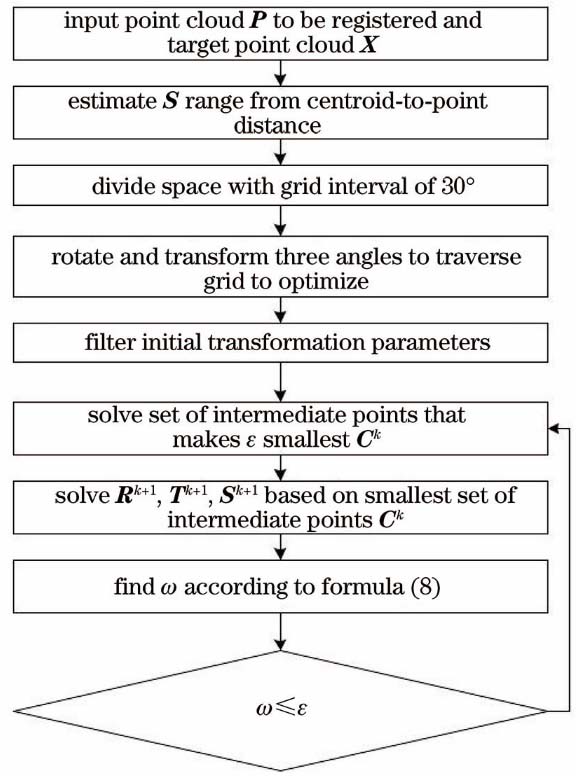
Fig. 1. Flow chart of proposed algorithm
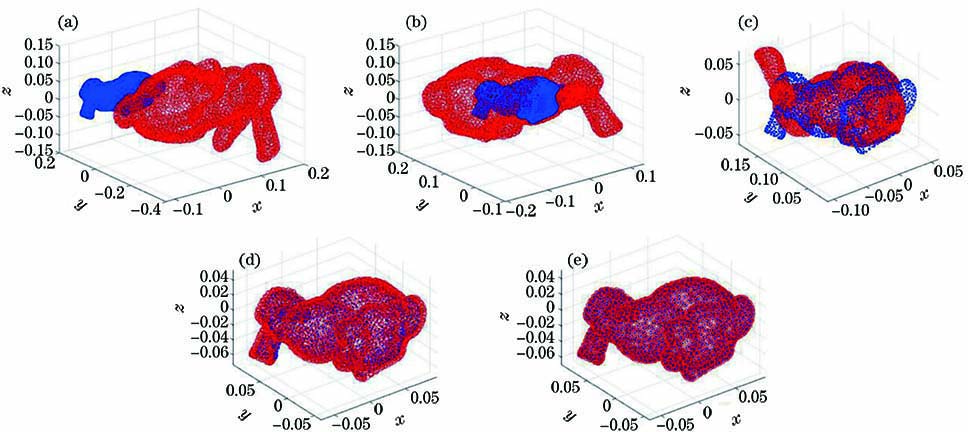
Fig. 2. Registration result when geometric parameter is at the lattice point. (a) Original point cloud; (b) ICP algorithm; (c) SICP algorithm; (d) first stage registration+ICP algorithm; (e) proposed algorithm
Fig. 3. Registration result when geometric parameter is not at the lattice point. (a) Original point cloud; (b) ICP algorithm; (c) SICP algorithm; (d) first stage registration+ICP algorithm; (e) proposed algorithm
Fig. 4. Butterfly model data collection. (a) Butterfly model in kind; (b) butterfly point cloud data
Fig. 5. Registration result when geometric parameter is at the lattice point. (a) Original point cloud; (b) ICP algorithm; (c) SICP algorithm; (d) first stage registration+ICP algorithm; (e) proposed algorithm
Fig. 6. Registration result when geometric parameter is not at the lattice point. (a) Original point cloud; (b) ICP algorithm; (c) SICP algorithm; (d) first stage registration+ICP algorithm; (e) proposed algorithm
|
Table 1. Registration error and relative scale error of Bunny point cloud data
|
Table 2. Registration error and relative scale error of butterfly point cloud

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20