
Haoyu Han, Yuan Zhang, Xie Han. Improved Laser Point Cloud Filtering Algorithm[J]. Laser & Optoelectronics Progress, 2021, 58(20): 2010001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 20, 2010001 (2021)
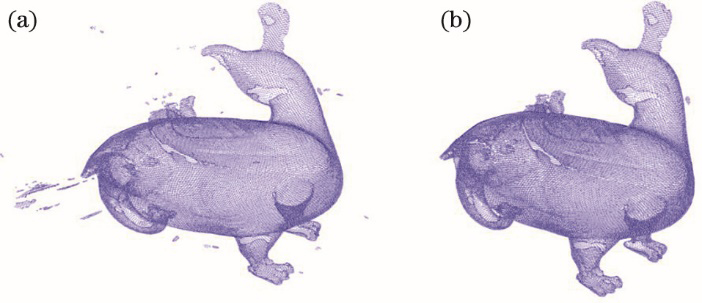
Fig. 1. Results of statistical filtering algorithm before and after processing. (a) Initial scanning point cloud; (b) point cloud after processing
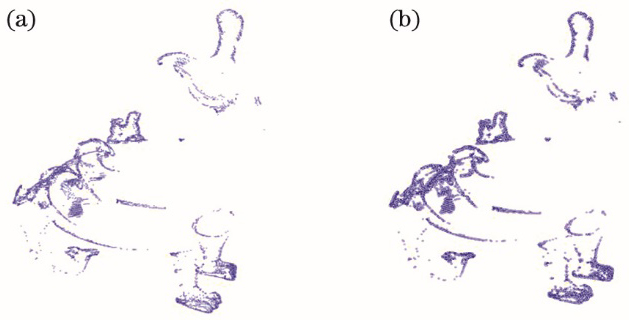
Fig. 2. Results of different tensor voting methods. (a) Normal tensor voting method; (b) point tensor voting method
Fig. 3. Estimated results at different K values. (a) K=15; (b) K=5
Fig. 4. Filtering results of noise plane
Fig. 5. Point clouds of bird bottle model under different algorithms. (a) Initial point cloud; (b) proposed algorithm; (c) Ref. [4]; (d) Ref. [5]
Fig. 6. Point clouds of hand model under different algorithms. (a) Initial point cloud; (b) proposed algorithm; (c) Ref. [4]; (d) Ref. [5]
Fig. 7. Point clouds of buddha model under different algorithms. (a) Initial point cloud; (b) proposed algorithm; (c) Ref. [4]; (d) Ref. [5]
Fig. 8. Point clouds of stone model under different algorithms. (a) Initial point cloud; (b) proposed algorithm; (c) Ref. [4]; (d) Ref. [5]
Fig. 9. Point clouds of tortoise model under different algorithms.(a) Initial point cloud; (b) proposed algorithm; (c) Ref. [4]; (d) Ref. [5]
|
Table 1. Ratio of number of points between filter model and noiseless model unit: %
|
Table 2. Points and processing time of different models

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20