
Yunlei Sun, Qingxiao Wu. An Improved Simultaneous Localization and Mapping System[J]. Laser & Optoelectronics Progress, 2019, 56(16): 161013
- Laser & Optoelectronics Progress
- Vol. 56, Issue 16, 161013 (2019)
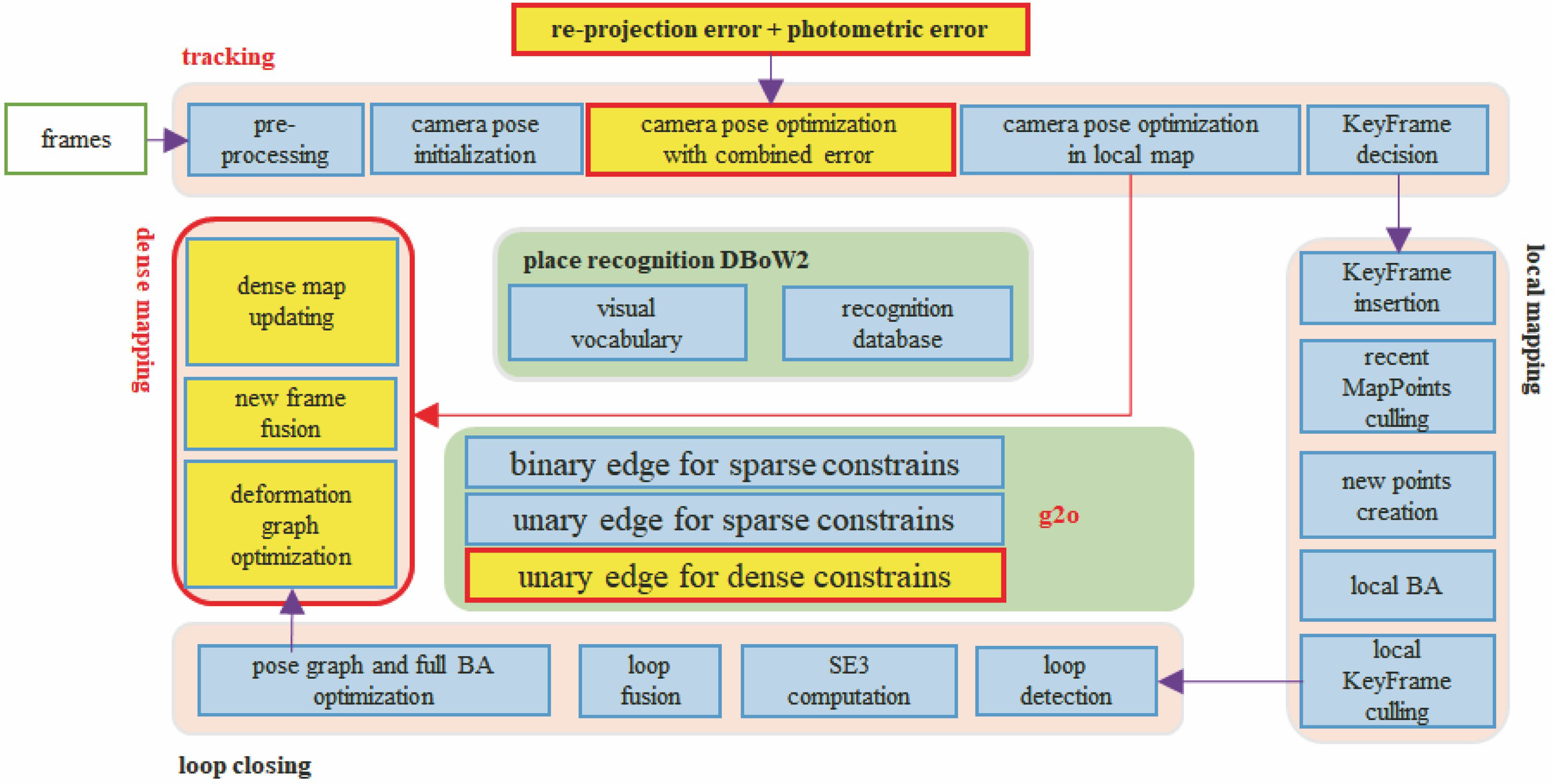
Fig. 1. Overview of improved system
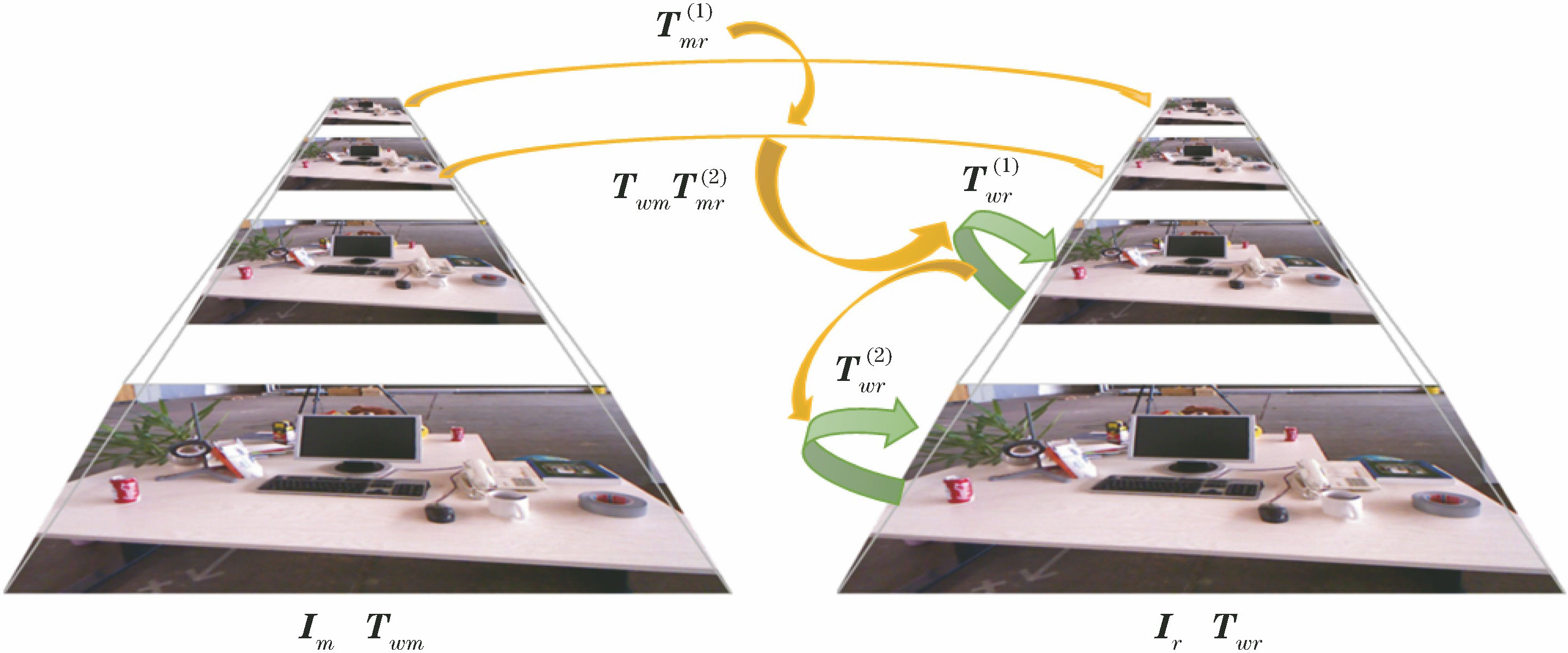
Fig. 2. Schematic of four-layer image pyramid model and improved camera pose estimation process
Fig. 3. Unary edge and binary edge models in g2o library. (a) Unary edge model; (b) binary edge model
Fig. 4. Comparison between ground truths and real trajectories of cameras generated by improved ORB-SLAM2 system on four frame sequences. (a) fr1/desk frame sequence; (b) fr1/desk2 frame sequence; (c) fr1/plant frame sequence; (d) fr1/xyz frame sequence
Fig. 5. Reconstruction results and camera trajectories on four frame sequences by improved ORB-SLAM2 system on ICL-NUIM benchmark datasets. (a) lr_kt0; (b) lr_kt1; (c) lr_kt12; (d) lr_kt3
Fig. 6. Comparison of reconstruction results of Kintinuous, ElasticFusion, and improved ORB-SLAM2 systems on closed-loop region of lr_kt3 frame sequence. (a) Kintinuous system; (b) ElasticFusion system; (c) improved ORB-SLAM2 system
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Comparison of camera trajectories on TUM RGB-D benchmark datasets
|
Table 2. Details of four frame sequences on ICL-NUIM benchmark datasets
| ||||||||||||||||||||||||
Table 3. Comparison of 3D models on ICL-NUIM benchmark datasets

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20