
Zheng-Ping Li, Xin Huang, Yuan Cao, Bin Wang, Yu-Huai Li, Weijie Jin, Chao Yu, Jun Zhang, Qiang Zhang, Cheng-Zhi Peng, Feihu Xu, Jian-Wei Pan, "Single-photon computational 3D imaging at 45 km," Photonics Res. 8, 1532 (2020)
- Photonics Research
- Vol. 8, Issue 9, 1532 (2020)
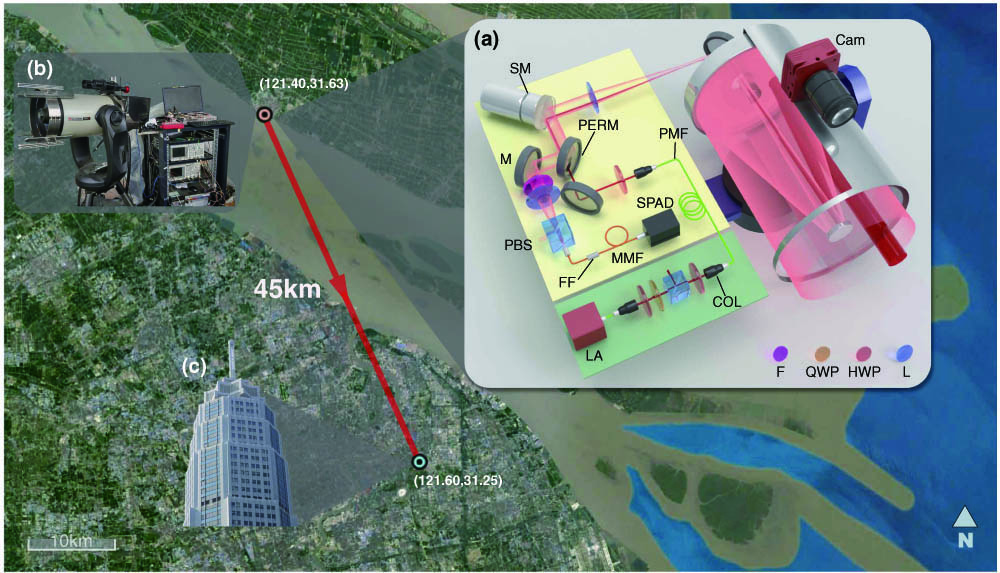
Fig. 1. Illustration of long-range active imaging. Satellite image of the experimental layout in Shanghai city, where the single-photon lidar is placed on Chongming Island and the target is a tall building in Pudong. (a) Schematic diagram of the setup. SM, scanning mirror; Cam, camera; M, mirror; PERM, 45° perforated mirror; PBS, polarization beam splitter; SPAD, single-photon avalanche diode; MMF, multimode fiber; PMF, polarization-maintaining fiber; LA, laser (1550 nm); COL, collimator; F, filter; FF, fiber filter; L, lens; HWP, half-wave plate; QWP, quarter-wave plate. (b) Photograph of the setup. The optical system consists of a telescope congregation and an optical-component box for shielding. (c) Close-up photograph of the target, the Pudong Civil Aviation Building. The building is 45 km from the single-photon lidar setup.
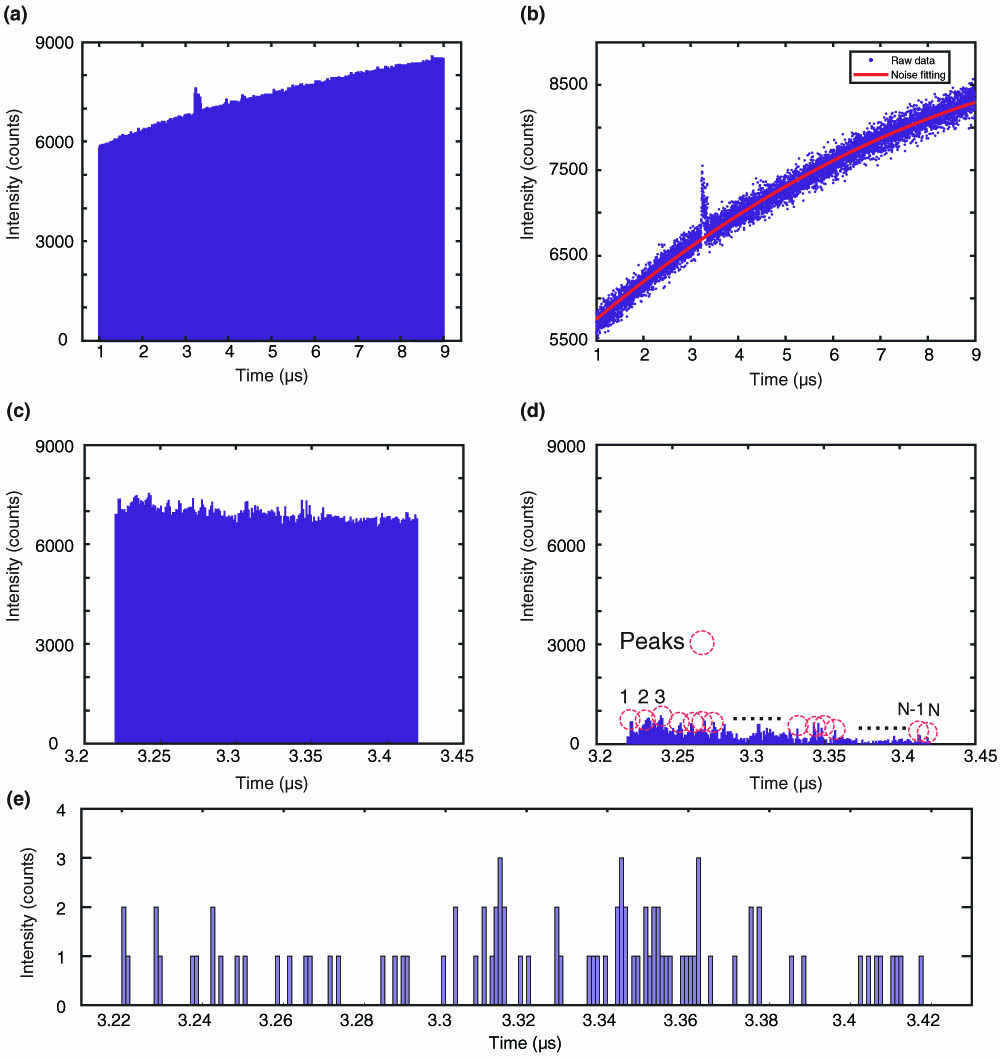
Fig. 2. Raw-data histogram and global-gating process. (a) Raw-data histogram for the 45 km imaging experiment over the laser period (∼ 10 μs T gate
Fig. 3. Long-range 3D imaging over 45 km. (a) Real visible-band image (tailored) of the target taken with a standard astronomical camera. This photograph is substantially blurred due to the inadequate spatial resolution and the air turbulence in the urban environment. The red rectangle indicates the approximate lidar FoR. (b)–(e) Reconstruction results obtained by using the pixelwise maximum likelihood (ML) method, photon-efficient algorithm [18], unmixing algorithm by Rapp and Goyal [21], and the proposed algorithm, respectively. The single-photon lidar recorded an average PPP of ∼ 2.59 ∼ 0.03
Fig. 4. Long-range target taken in daylight over 21.6 km. (a) Topology of the experiment. (b) Ground-truth image of the target (building K11). (c) Visible-band image of the target taken with a standard astronomical camera. (d)–(g) Depth profile taken with the proposed single-photon lidar in daylight and reconstructed by applying the different algorithms to the data with 1.2 signal PPP and SBR = 0.11
Fig. 5. Long-range target at 21.6 km imaged in daylight and at night. (a) Visible-band image of the target taken with a standard astronomical camera. (b) Depth profile of image taken in daylight and reconstructed with signal PPP = 1.2 SBR = 0.11 PPP = 1.2 SBR = 0.15
Fig. 6. Reconstruction of multilayer depth profile of a complex scene. (a) Visible-band image of the target taken by a standard astronomical camera mounted on the imaging system with an f = 700 mm
|
Table 1. Summary of Representative Single-Photon Imaging Experiments, Focusing on Imaging Distance and Sensitivity


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20