Zheng-Ping Li1,2,3,†, Xin Huang1,2,3,†, Yuan Cao1,2,3,†, Bin Wang1,2,3..., Yu-Huai Li1,2,3, Weijie Jin1,2,3, Chao Yu1,2,3, Jun Zhang1,2,3, Qiang Zhang1,2,3, Cheng-Zhi Peng1,2,3, Feihu Xu1,2,3,* and Jian-Wei Pan1,2,3|Show fewer author(s)
Author Affiliations
1Hefei National Laboratory for Physical Sciences at Microscale and Department of Modern Physics, University of Science and Technology of China, Hefei 230026, China2Shanghai Branch, CAS Center for Excellence in Quantum Information and Quantum Physics, University of Science and Technology of China, Shanghai 201315, China3Shanghai Research Center for Quantum Sciences, Shanghai 201315, Chinashow less
DOI: 10.1364/PRJ.390091
Cite this Article
Set citation alerts
Zheng-Ping Li, Xin Huang, Yuan Cao, Bin Wang, Yu-Huai Li, Weijie Jin, Chao Yu, Jun Zhang, Qiang Zhang, Cheng-Zhi Peng, Feihu Xu, Jian-Wei Pan, "Single-photon computational 3D imaging at 45 km," Photonics Res. 8, 1532 (2020)
Copy Citation Text
show less
Abstract
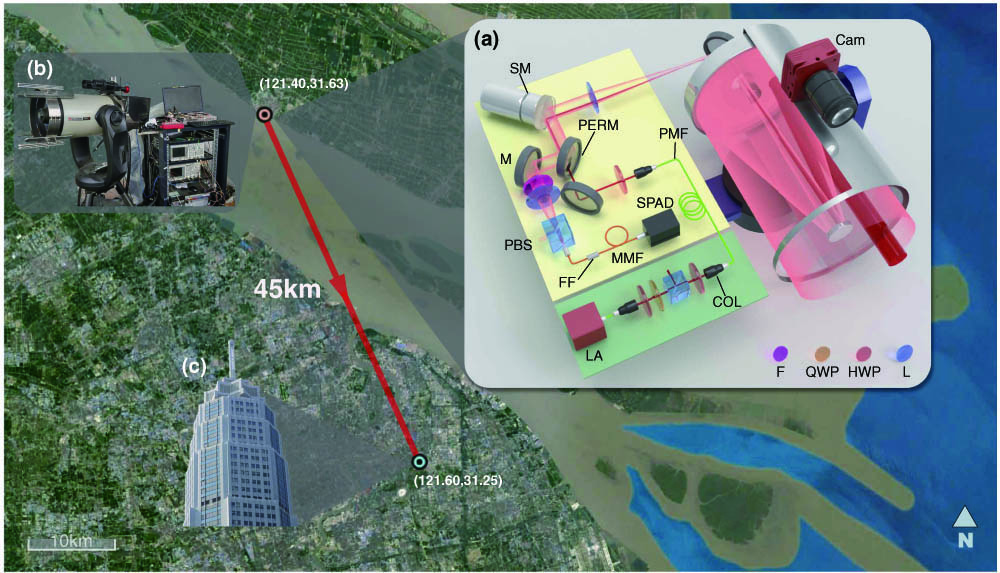
Single-photon light detection and ranging (lidar) offers single-photon sensitivity and picosecond timing resolution, which is desirable for high-precision three-dimensional (3D) imaging over long distances. Despite important progress, further extending the imaging range presents enormous challenges because only a few echo photons return and are mixed with strong noise. Here, we tackled these challenges by constructing a high-efficiency, low-noise coaxial single-photon lidar system and developing a long-range-tailored computational algorithm that provides high photon efficiency and good noise tolerance. Using this technique, we experimentally demonstrated active single-photon 3D imaging at a distance of up to 45 km in an urban environment, with a low return-signal level of photon per pixel. Our system is feasible for imaging at a few hundreds of kilometers by refining the setup, and thus represents a step towards low-power and high-resolution lidar over extra-long ranges.