
Yuemeng Zhao, Huigang Liu. Detection and Tracking of Low-Altitude Unmanned Aerial Vehicles Based on Optimized YOLOv4 Algorithm[J]. Laser & Optoelectronics Progress, 2022, 59(12): 1215017
- Laser & Optoelectronics Progress
- Vol. 59, Issue 12, 1215017 (2022)
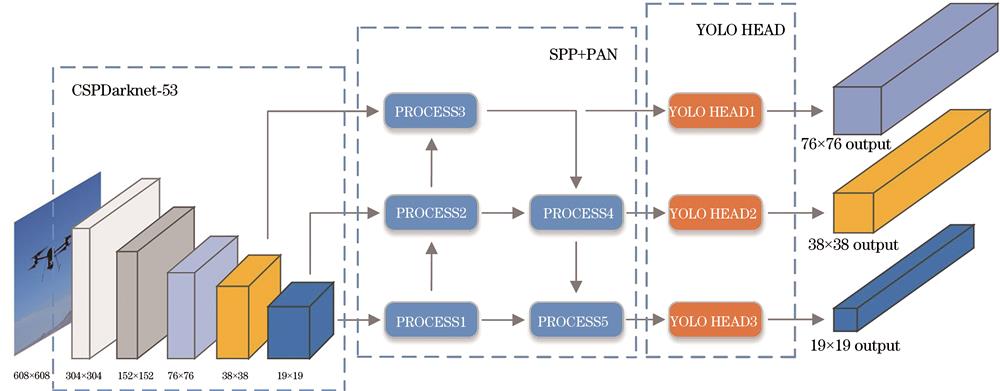
Fig. 1. Schematic diagram of YOLOv4 structure
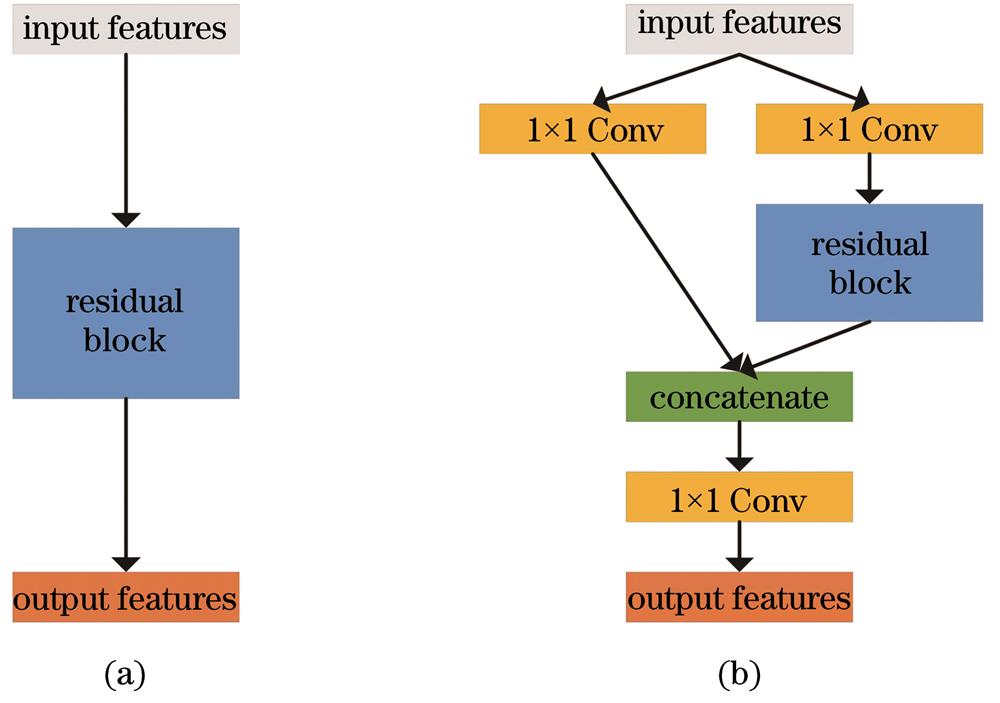
Fig. 2. Comparsion between Darknet-53 and CSPDarknet-53. (a) Darknet-53; (b) CSPDarknet-53
Fig. 3. Cascade matching process
Fig. 4. K-means clustering analysis result
Fig. 5. Optimized YOLOv4 network structure
Fig. 6. Detection and tracking model based on a combination of optimized YOLOv4 and DeepSORT
Fig. 7. Loss function curve
Fig. 8. Test results. (a) YOLOv4; (b) optimized YOLOv4
Fig. 9. Visual detection effects of small targets. (a) YOLOv3; (b) YOLOv4; (c) optimized YOLOv4
Fig. 10. Visual tracking performance of optimized YOLOv4-DeepSORT method
|
Table 1. Value of anchor in LARotorcraft dataset
|
Table 2. Performance comparison of different detection algorithms


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20