
Zhenyu Zhou, Jun Xia, Jun Wu, Chenliang Chang, Xi Ye, Shuguang Li, Bintao Du, Hao Zhang, Guodong Tong. Learning-based phase imaging using a low-bit-depth pattern[J]. Photonics Research, 2020, 8(10): 1624
- Photonics Research
- Vol. 8, Issue 10, 1624 (2020)
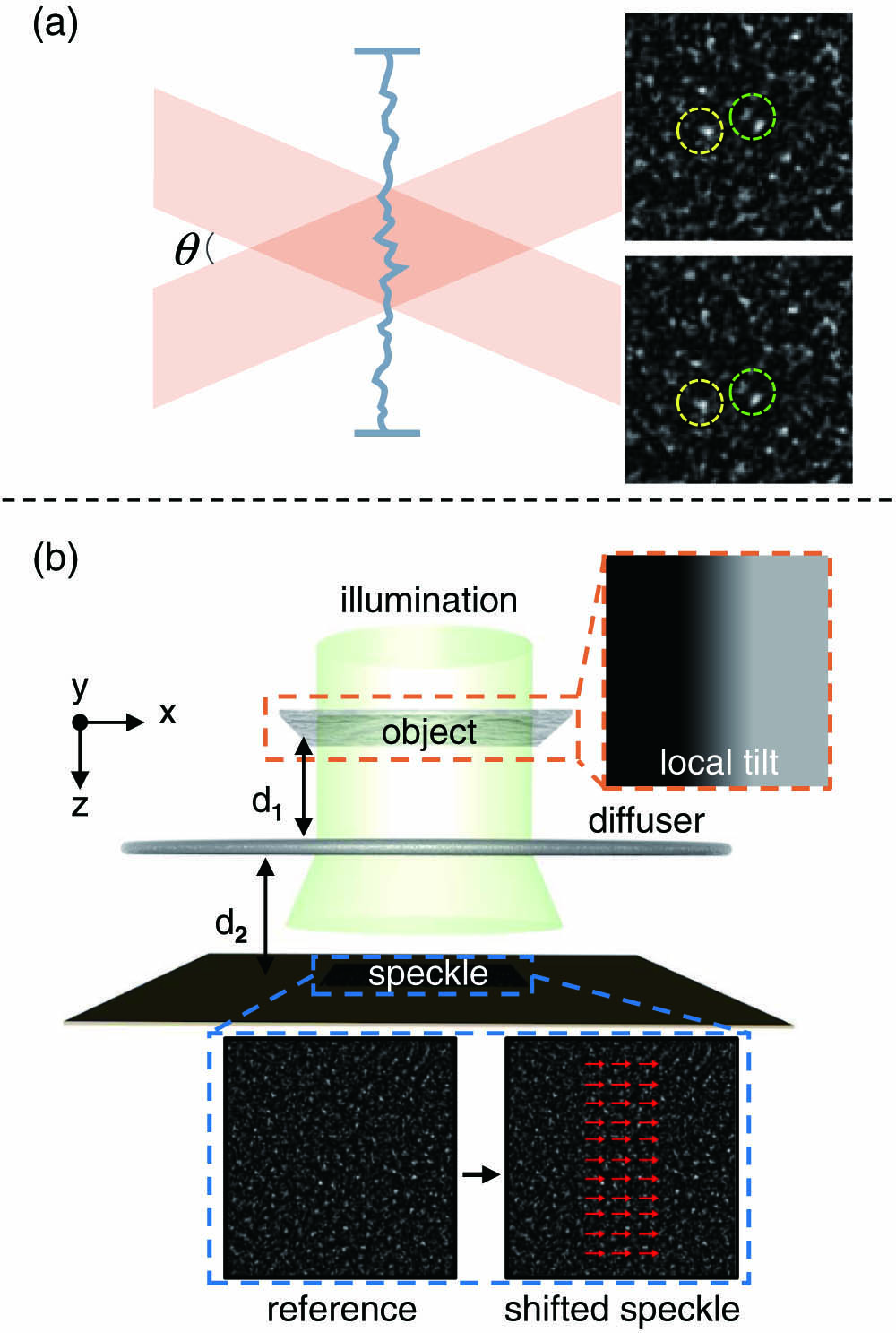
Fig. 1. (a) Beam passes through an ideal random phase mask with negligible thickness and speckles generated by two light beams with different incident angles. The two speckle patterns show high similarity, and the speckle grains in the circles indicate the same local features. (b) Conceptual demonstration of the optical memory effect. Placing a phase object causes a local tilt of the incident light wavefront, which results in a partial translation of the speckle.
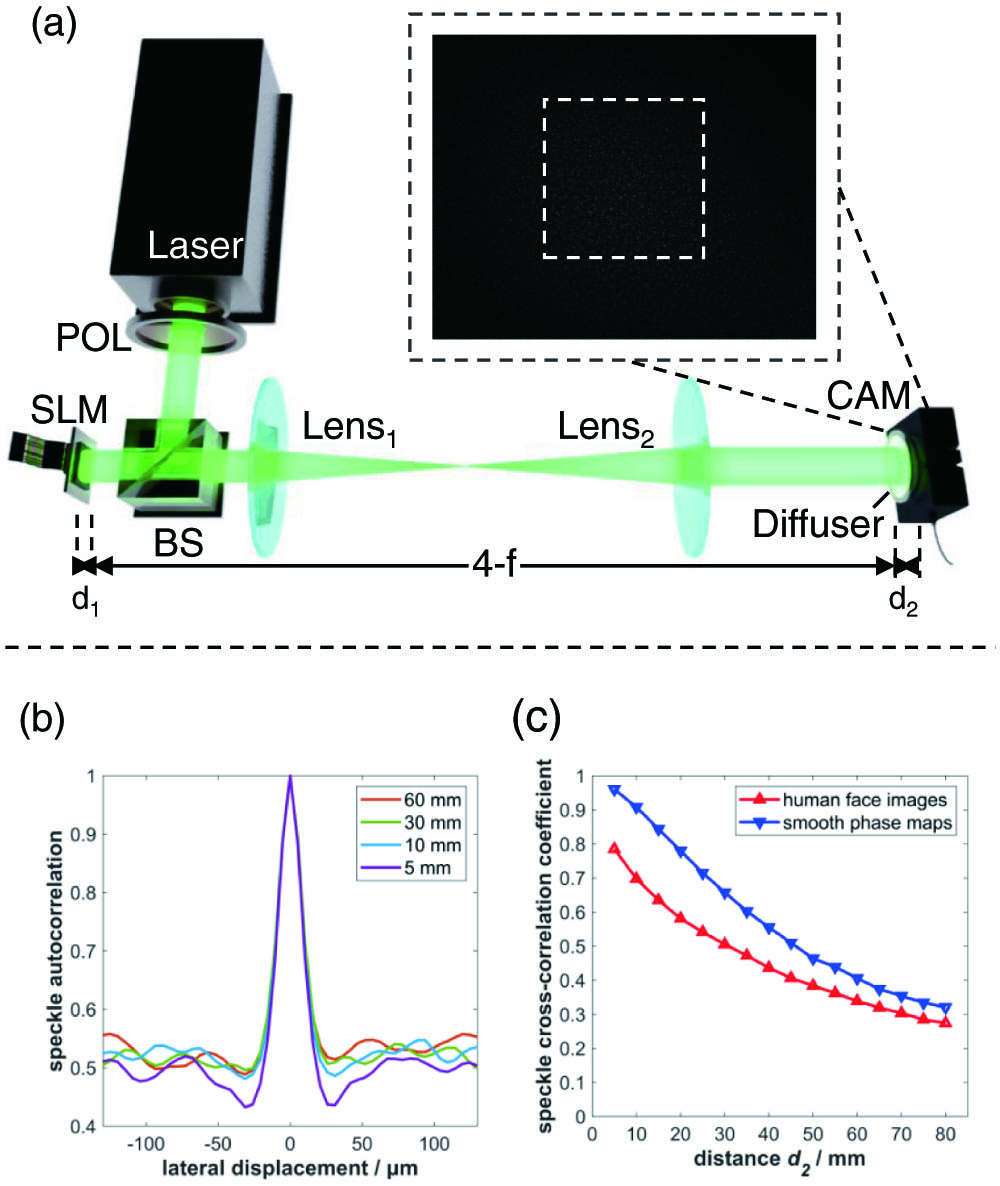
Fig. 2. Experimental setup for speckle pattern acquisition. Phase objects are loaded by the spatial light modulator. The thin diffuser is placed at the back focal plane of the 4 − f d 2 ∼ 20 μm d 2
Fig. 3. Schematic diagram of the proposed method for phase imaging and the basic architecture of CNN. The input to the network is a single-shot low-bit pattern or raw intensity measurement.
Fig. 4. Experimental results of phase recovery on (a) random grayscale image datasets (i–iii) and (b) human face datasets (iv–vi) with different diffraction distances d 2
Fig. 5. (a) Raw measurement and processed patterns with different bit depth; (b) SSIM of the reconstructions at each image bit depth.
Fig. 6. Experimental demonstration of phase imaging with low-bit speckle pattern. Results of reconstructing random smooth phase maps (left) and human face images (right) via DNN with patterns of different bit depths. The images in the middle column of each graph group are enlarged views of the areas selected by the yellow dotted box in the low-bit speckle patterns in the first column. The speckle patterns acquired at a distance of d 2 = 60 mm d 2 = 5 mm
Fig. 7. Generalizability testing of the trained DNN in full-bit (10 bit measurement) and low-bit (1 bit binary pattern) imaging and comparison of the results of phase recovery under the three schemes: (i) imaging using diffraction patterns (without diffuser) via DNN; (ii) imaging using speckle patterns (with diffuser) via DNN; (iii) imaging using speckle patterns (with diffuser) via SDVF. All the data acquisitions adopt the same experimental configuration except for the diffuser settings. The distance between the diffuser and the camera sensor is fixed to 5 mm in both scheme (ii) and scheme (iii).
Fig. 8. (a) Gray statistics of captured speckle images. Inset: graph of imaging accuracy and pattern sparseness at various binarization thresholds. (b) Result of reconstructing objects from binary patterns with different sparseness.
|
Table 1. Mean Values of Structural Similarity Index (SSIM) of DNN and SDVF on the Dataset
|
Table 2. Mean Values of Structural Similarity Index (SSIM) of DNN (Speckle), DNN (Diffraction) and SDVF on Three Classes of Samples

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20