
Yongzhi Min, Jie Hu, Tianfang Sun. Calibration Method of Position-Pose Relation Between Cameras in Transfer Station of Image-Based Subgrade Monitoring System[J]. Laser & Optoelectronics Progress, 2021, 58(12): 1215007
- Laser & Optoelectronics Progress
- Vol. 58, Issue 12, 1215007 (2021)
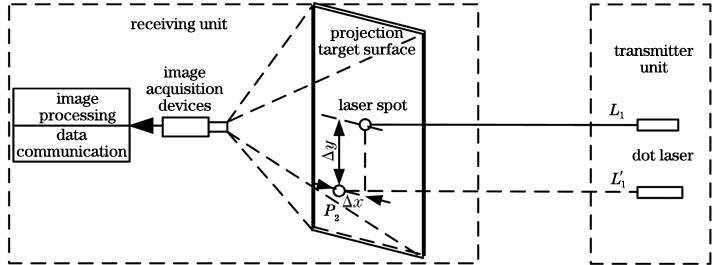
Fig. 1. Schematic diagram of image settlement monitoring terminal
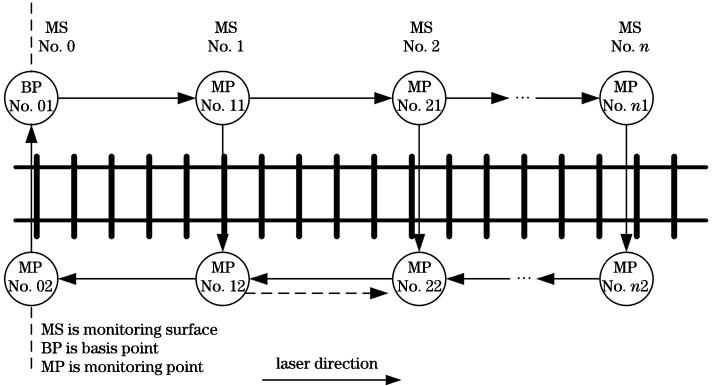
Fig. 2. Schematic diagram of camera network vision measurement for settlement deformation transfer
Fig. 3. Schematic diagram of closed loop in camera network
Fig. 4. Geometric relationship before and after movement
Fig. 5. Schematic diagram of solution of posture relation between camera and target
Fig. 6. Angle and translation errors at various noise levels. (a) Angle error; (b) translation error
Fig. 7. Experimental setup
Fig. 8. Original target image and feature point center location result. (a) Original target image;(b) feature point center location result
Fig. 9. Reprojection error of feature point. (a) Target 1; (b) target 2
|
Table 1. Calibration results of inner parameters of camera

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20