
Jun He, Fumin Zhang, Huadi Zhang, Xinghua Qu. Multilateral laser tracking system self-calibration method based on spherical center fitting[J]. Infrared and Laser Engineering, 2020, 49(8): 20190438
- Infrared and Laser Engineering
- Vol. 49, Issue 8, 20190438 (2020)
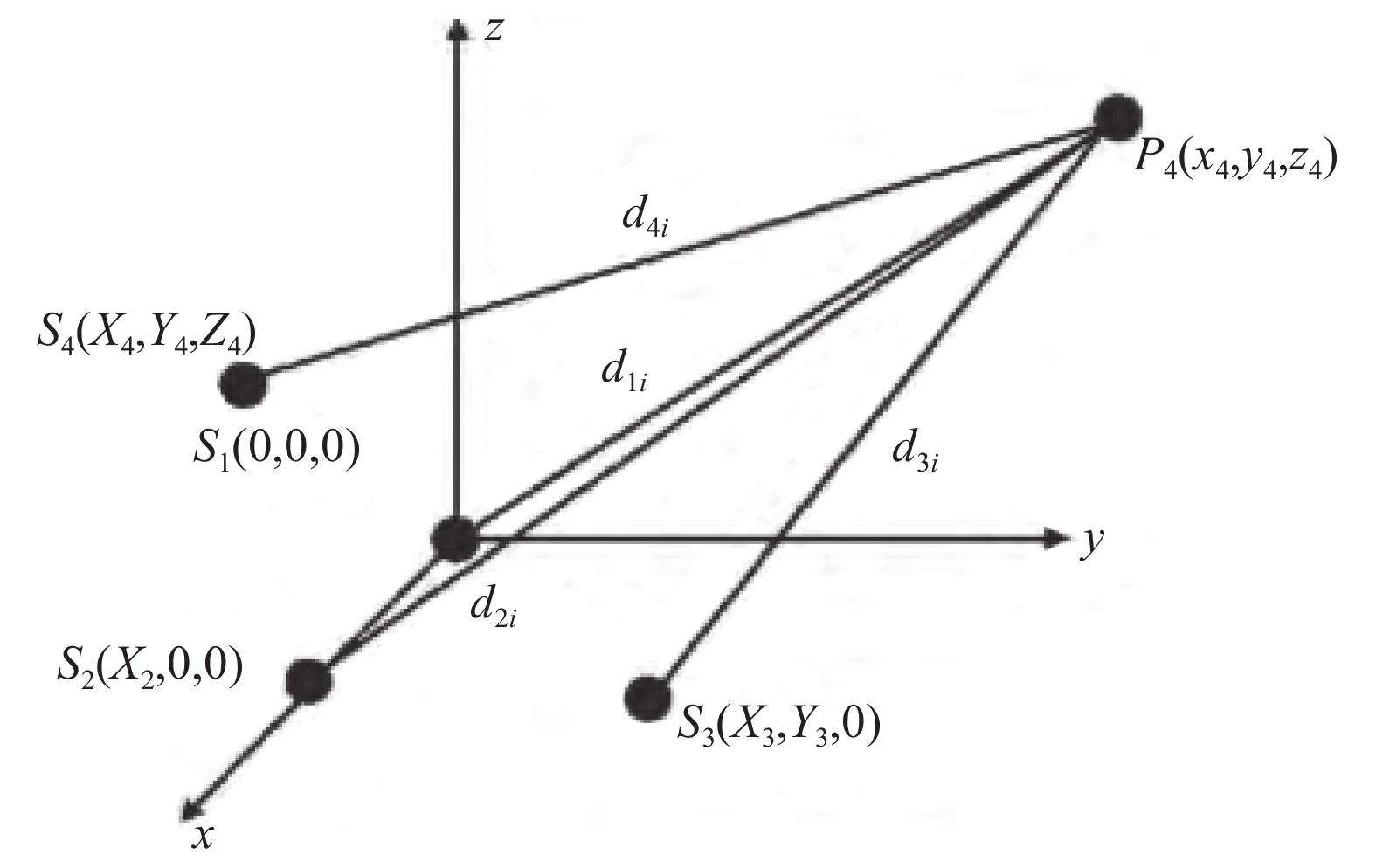
Fig. 1. Self-calibrated layout of four-station
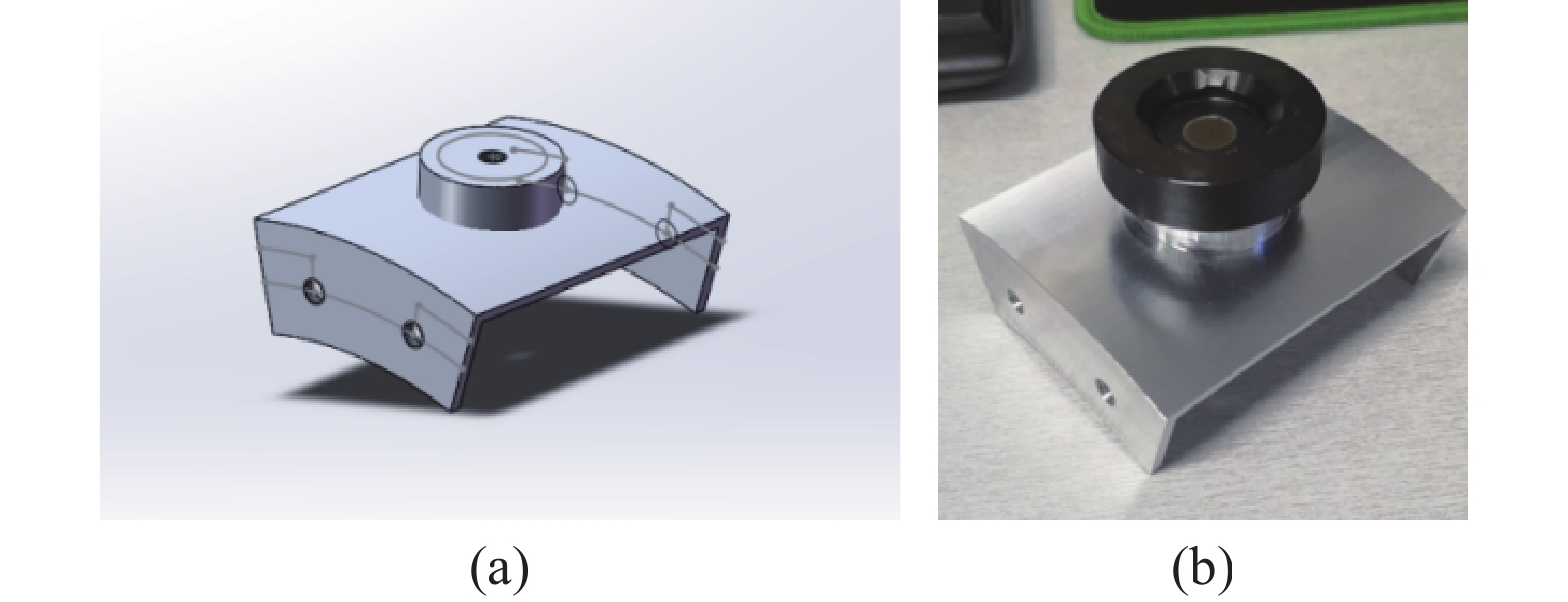
Fig. 2. Design drawing and physical drawing of the fixture
Fig. 3. Construction of spherical center fitting self-calibration system for four-station model using two laser trackers
Fig. 4. Position error of original point
Fig. 5. Schematic of self-calibration and fixture connection
Fig. 6. Spherical center fitting
Fig. 7. Scale bar to be measured
Fig. 8. Influence of original point error on measurement result
|
Table 1.
Spherical center fitting data and result
球心拟合数据及结果
|
Table 2.
Comparison of scale bar length measured by four-station multilateral method and single station
四站模型多边法与单站测得标准尺长度比较
|
Table 3.
Comparison of scale bar length measured by three-station multilateral method and single station
三站模型多边法与单站测得标准尺长度比较

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20