
Liyuan Li, Wentao Li, Haiyan Xu, Zhuo Zhang, Yingjuan Xie, Xuewu Zhang. Camera Pose Estimation with Uncertain Reference Point Based on Orthogonal Iterative[J]. Laser & Optoelectronics Progress, 2019, 56(1): 011503
- Laser & Optoelectronics Progress
- Vol. 56, Issue 1, 011503 (2019)
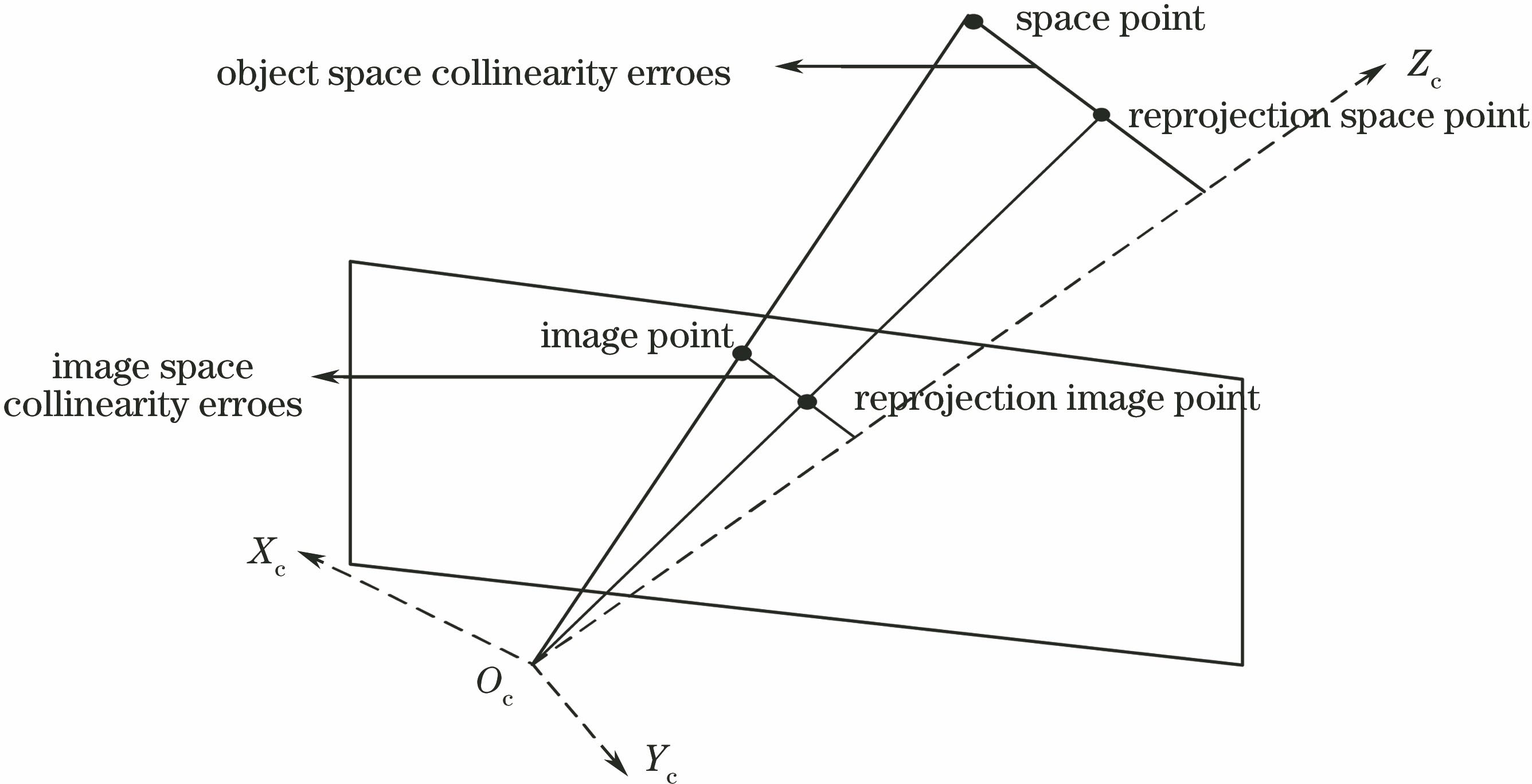
Fig. 1. Geometric meaning of object residuals and image residuals in camera pose estimation
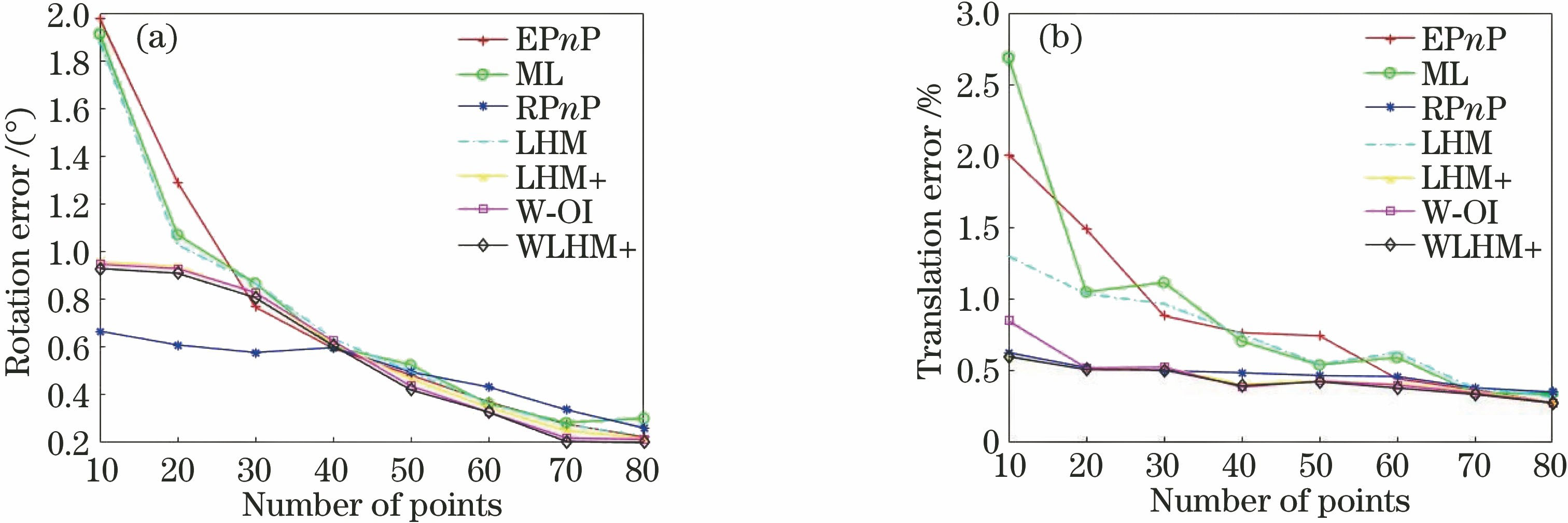
Fig. 2. (a) Rotation matrix error and (b) translation vector error with different numbers of reference points
Fig. 3. Calculation time of different algorithms with different number of reference points
Fig. 4. (a) Rotation matrix error and (b) translation vector error of different distance between space reference point center and camera
Fig. 5. (a) Rotation matrix error and (b) translation vector error of different distance between space reference point center and camera optical axis
Fig. 6. Real image experiment device structure
Fig. 7. Result of re-projection in image points
|
Table 1. Difference between re-projection result of spatial reference point on image plane and real image point
|
Table 2. Results of real image experiment

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20