
Qi-Chao WANG, Song-Hua WU, Hong-Wei ZHANG, Bing-Yi LIU, Kai-Lin ZHANG. Observation and data processing of offshore wind field based on UAV-borne Doppler lidar[J]. Journal of Infrared and Millimeter Waves, 2021, 40(4): 516
- Journal of Infrared and Millimeter Waves
- Vol. 40, Issue 4, 516 (2021)
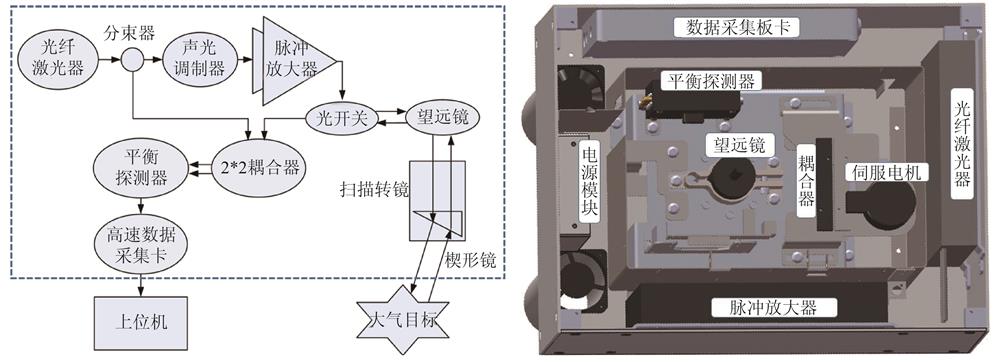
Fig. 1. Schematic and structure diagram of the airborne coherent Doppler lidar system
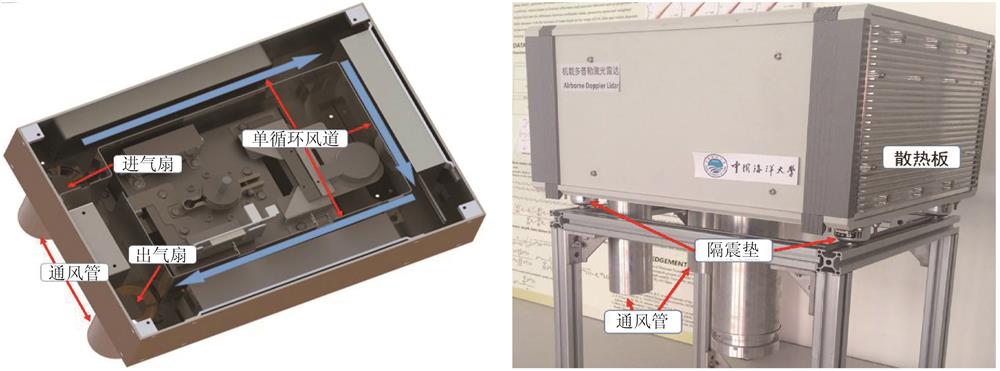
Fig. 2. Schematic diagram of heat-removal system
Fig. 3. Observation modes of the airborne coherent Doppler lidar
Fig. 4. Attitude information of the airborne coherent Doppler lidar
Fig. 5. Correction of airborne coherent Doppler lidar radial pointing angle
Fig. 6. Flow diagram of airborne coherent Doppler lidar radial velocity correction
Fig. 7. Velocity information of airborne coherent Doppler lidar
Fig. 8. Velocity information of airborne coherent Doppler lidar
Fig. 9. Shipborne UAV ocean observation system
Fig. 10. Experimental area and route design
Fig. 11. Wind THI diagram obtained by ACDL on 2016.11.20
Fig. 12. Wind THI diagram obtained by ACDL on 2016.12.17
Fig. 13. Wind THI diagram obtained by ACDL on 2016.12.18
Fig. 14. Wind THI diagram obtained by ACDL on 2016.12.19
Fig. 15. Wind THI diagram obtained by GCDL on 2016.12.19
Fig. 16. Comparison of 10-minutes average wind profile between GCDL and ACDL
Fig. 17. Comparison of wind speed and wind direction between GCDL and ACDL
Fig. 18. Marine atmospheric boundary layer and wind profile obtained by ACDL
|
Table 1. Specifications of the airborne coherent Doppler lidar
|
Table 2. Attitude and motion parameters of the airborne coherent Doppler lidar
|
Table 3. Specifications of the Z-5 unmanned helicopter
|
Table 4. Specifications of the ground-based coherent Doppler lidar
|
Table 5. Typical offshore wind data observed by ACDL

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20